
Fターム[4C097TA10]の内容
補綴 (46,288) | 義肢・身体装着伸長具 (315) | 身体装着又は身体装着伸長具の構造 (92)
Fターム[4C097TA10]に分類される特許
1 - 20 / 92
歩行支援装置及びその制御方法
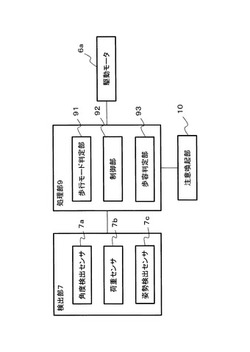
【課題】使用者の歩容の異常を検出することができる歩行支援装置を提供する。
【解決手段】本発明の一形態に係る歩行支援装置1は、使用者の腿部に装着され、使用者の歩行を支援する歩行支援装置であって、使用者の歩行状態を検出する検出手段7と、検出手段7の検出結果に基づいて算出した、遊脚動作時間と遊脚完了予測時間とに基づいて、使用者の歩容が正常か否かを判定する歩容判定手段93と、を備える。このとき、遊脚動作時間と遊脚完了予測時間との差が0以下であると、制御手段92を制御して使用者の膝が伸展するように駆動手段6を動作させる。
(もっと読む)
電動義手

【課題】作動音を低減して静粛性を高めつつ、軽量化を図ることのできる電動義手を提供する。
【解決手段】義手本体10に支持された第1指部35及び第2指部42を回動させる駆動源として、高分子材料により形成され、電圧印加に応じて弾性変形し、電圧印加の停止に応じて元の形状に復元することにより直線往復運動する高分子アクチュエータ50を用いる。上記直線往復運動を回動運動に変換して各指部35,42に伝達する動力伝達部60を設ける。高分子アクチュエータ50から動力伝達部60を経て両指部35,42に至る動力伝達経路に、両指部35,42を含む複数のレバーを有するリンク機構70を設ける。これらのレバーの少なくとも1つを、支点、力点及び作用点を有するてことして機能させる。そして、力点を通じてレバーに入力される変位量を増幅して、作用点から出力させる。
(もっと読む)
筋力補助装置及びその動作方法
【課題】第1の装着具に対する第2の装着具の曲げ角度を大きくすることができる筋力補助装置を提供する。
【解決手段】筋力補助装置は、関節の一方の骨に沿って配置される第1の装着具10と、関節の他方の骨に沿って配置される第2の装着具20と、第1の装着具10に一端31を、第2の装着具20に他端32を設ける人工筋30とを備え、使用者の肘、膝、又は手首の動作を支援し、第1の装着具10に一端51を設ける補助人工筋50を備え、補助人工筋50の他端52を、スイングアーム40を介して人工筋30の一端31と接続し、補助人工筋50によって、人工筋30の一端31を第1の装着具10に対して変位可能な構成としたことを特徴とする。
(もっと読む)
歩行支援装置
【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、1歩行周期の間を動作の状態に応じて区分し、各歩行動作状態の区分毎に各装着部21〜23の締付強度を予め決めておく。そして、各センサ出力から、脚がどの区分の歩行動作状態にあるかを検出し、検出した区分対応する締付力で各装着部21〜23を締め付ける。
(もっと読む)
背筋力補助装置
【課題】モータが停止したときにワイヤが伸びてユーザの姿勢が崩れないように、ワイヤを保持するフェイルセーフ機構を備えた背筋力補助装置を提供する。
【解決手段】背筋力補助装置100は、ユーザの腰に装着される腰ハーネス20と、腰ハーネス20に取り付けられているワイヤ巻き上げ器30と、ユーザの背中に装着される背ハーネス10と、ワイヤ巻き上げ器30から伸びて背ハーネス10に固定されているワイヤWaを備える。ワイヤ巻き上げ器30は、ワイヤWaを巻き取るプーリ22と、プーリ22を駆動するモータ34と、プーリ22とモータ34の間で回転力を伝達するウォームギア37とを備えている。ウォームギア37は、逆駆動され難いので、モータ34が停止してもワイヤWaが伸びてユーザの姿勢が崩れることはない。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者が体感する負荷の変動を小さくした歩行支援をする。
【解決手段】歩行支援装置において、装着者Mの疲労度を推定し、推定した疲労度をアシスト量を決定するパラメータとして使用することで、疲労度を考慮した可変アシスト制御を行う。具体的には、脚部を繋ぐリンク(連結部)に、大腿部、脹脛部、足部の各部を拘束部材で拘束し、各拘束部材に歪ゲージを取り付け、歪ゲージの出力から各部の拘束力を測定する。この測定した拘束力が大きくなると、対応する各部がむくんでいると考えられ、装着者の疲労度が増加していると推定される。そこで、推定した疲労度の増加に対応して、アシスト量を通常の設定(アシスト量)よりも大きくする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
歩行支援装置
【課題】弾性エネルギを利用する歩行支援装置であってシンプルな構成の歩行支援装置を提供する。
【解決手段】歩行支援装置100は、靴2、靴底前プレート12、靴底後プレート22、及び、スプリング18と28を備えている。靴底前プレート12は、つま先と踵の間の位置で靴の側方に伸びる回転軸16で靴2に軸支されている。靴底前プレートの先端はつま先の下へ伸びている。靴底後プレート22は、つま先と踵の間の位置で靴2の側方に伸びる回転軸26で靴2に軸支されている。靴底後プレート22の先端は踵の下へ伸びている。靴底前プレート12と靴底後プレート22は、連動して互いに反対方向に回転するように係合している。スプリング18と28は、靴底前プレート12の先端と靴底後プレート22の先端を下方へ付勢するように配置されている。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】装着式動作補助装置1は、複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる動作補助装着具10を備えるとともに、動作補助装着具10による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
筋力補助装置
【課題】従来の装置よりも大きな補助力をユーザに与えることができる筋力補助装置を提供する。
【解決手段】筋力補助装置100は、腰ハーネス20、背ハーネス10、ガイドプーリ16、及び、ワイヤを巻き上げるための巻き上げ器22を有している。腰ハーネス20は、ユーザの腰に装着される。巻き上げ器22は、腰ハーネス20に取り付けられている。背ハーネス10は、ユーザの背に装着される。ガイドプーリ16は、背ハーネス10に支持されており、ユーザの背中後方に配置される。巻き上げ器22から伸びているワイヤWが、ガイドプーリ16を介してユーザの背の上部に相当する位置で背ハーネス10に固定されている。ガイドプーリ16によって背の上部を後方から引っ張るようにワイヤWを配索するので、背屈方向に大きなモーメントをユーザに与えることができる。
(もっと読む)
断端に装着したライナーの義肢ソケットへの取付構造
【課題】 従来にあっては、使用者がロックピン付きライナーを装着するに際し、装着状態において差し込みロックピンが断端から真っ直ぐな状態になっていないと、ロックピンの先端を収容部の差し込み孔に差し込むことが困難となるため使用者がライナーを装着することが非常に面倒であると共に時間が掛かり、また、ソケットに装着できたとしてもその場合は断端に負担が掛かるといった問題があった。
【解決手段】 義肢ソケット3の下部に取付けられたロックピン係止手段4と、該ロックピン係止手段にロック可能に挿入される溝61が形成されると共に上端に吸着板62が形成されたロックピン6と、ライナー1の下部に取付けられ該ライナーが前記義肢ソケット内への挿入途中で前記ロックピンの吸着板と一体となる脱着手段2とより構成した断端に装着したライナーの義肢ソケットへの取付構造である。
(もっと読む)
下肢装具
【課題】歩行動作中の足の状態に応じて中立揺動角を変更することのできる下肢装具を提供する。
【解決手段】下肢装具10は、下腿部材12と、足部材14と、コイルバネ22と、コイルバネの中立揺動角を変更できる調整部20を備える。調整部20は、足部材14が接地している場合の中立揺動角を、足部材14が接地していない場合の中立揺動角よりも底屈側に変更する。こ下肢装具10は、中立揺動角を底屈側に変更することによって、立脚の下腿が足を中心として前方へ揺動する際(即ち足が背屈する際)、下腿の揺動を抑える向き(足を底屈させる方向)に加わるバネ復元力を変更する前に比べて増大させることができる。
(もっと読む)
動力装置、動力システム、および動力制御方法
【課題】小容量のバッテリを用いつつ、かつ、稼働時間を延ばすことができる動力装置を提供する。
【解決手段】体部位の動作に合わせて可動する可動手段10と、身体部位の第1動作方向への動作時に、可動手段10を第1動作方向へ可動させるように可動手段10に対して動力を出力し、身体部位の第2動作方向への動作時に、可動手段10の第2動作方向への可動で生じる動力を回生するモータ20と、動力の回生によって生じた回生電力を蓄電し、モータ20が可動手段10に対して動力を出力する際に蓄電した回生電力をモータ20に供給するキャパシタ40と、を有する動力装置。
(もっと読む)
動作補助装置
【課題】人の関節に適切なトルクを付与して動作を補助する動作補助装置を提供する。
【解決手段】動作補助装置は、記憶モジュール、人の関節の角度を計測するセンサ、特定関節にトルクを加えるモータを有する装具、制御器を備える。記憶モジュールは、人の動作に伴って実現されるn個の関節角の第1時刻から第2時刻までの既知軌道群と、各既知軌道に対応するs次元の既知時系列データ群を記憶している。制御器は、計測されたn個の関節角の時系列データによるn次元計測軌道を取得し、その計測軌道に対応するs(n>s)次元の計測時系列データを算出する。制御器は、中間時刻までの各既知時系列データを計測時系列データと比較し、計測時系列データに最も近い既知時系列データを特定し、中間時刻以後に設定されている時刻以降に、特定された既知時系列データに対応する既知軌道における特定関節の軌道に、特定関節の角度が追従するようにモータを制御する。
(もっと読む)
義肢用インナーバッグ
【課題】 従来の義足のインナーバッグでは、吸着式の場合には断端部の発汗が問題となるって非常に装用感が悪かった。また金属ピン方式が現在主流であるがこれは、インナーバッグ外面とソケット内面とを密着させることなく義足保持を行なうものであって断端はインナーバッグに密着させねばならず装用感の改善に関しては特段の貢献はしていないものであった。
【解決手段】 通気性を有する繊維布製本体の内外表面の少なくとも除圧を要する部分に、多数の独立するシリコーンラバー突起を形成させたものであることを特徴とする義肢用インナーバッグ。
(もっと読む)
装着型動作支援装置
【課題】簡素な構成でありながら、三節部位を自然な屈曲姿勢とすることができ、装着者の骨関節に負担をかけることがなく、小型で、装着性が良好で、信頼性を向上させることができるようにする。
【解決手段】単関節駆動部は、単一の関節軸を支持し、ベース部に固定された関節軸支持部と、関節軸を中心に回転可能な駆動アーム部と、駆動アーム部に取り付けられるとともに、三節部位に装着される装着部とを備え、装着部は、三節部位の先端節に装着され、関節軸の位置は、駆動アーム部が目標到達位置にあるときに三節部位の2つの関節が屈曲し、かつ、装着部から関節部までの距離が、駆動アーム部が目標到達位置にあるときと、動作開始位置にあるときとで等しくなるように設定される。
(もっと読む)
1 - 20 / 92
[ Back to top ]