
Fターム[5F031LA13]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | ベルト、チェーン (344)
Fターム[5F031LA13]に分類される特許
1 - 20 / 344
エネルギー線照射装置及びワーク搬送機構
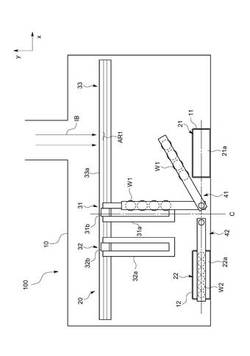
【課題】エネルギー線照射システムにおいて、異なる寸法のワークに効率的にエネルギー線を照射できるコンパクトで低コストの搬送機構を実現する。
【解決手段】異なる寸法のワークW1、W2がそれぞれ搭載される第1、第2ワークホルダ31a、32aと、各々のワークホルダを各々のワーク授受領域とエネルギー線照射領域AR1との間で進退移動させる進退機構33と、互いに異なる位置に設けられた第1及び第2ワーク収容部21a、22aと、第1のワーク授受領域にある第1ワークホルダ31aと第1ワーク収容部21aとの間でワークW1を搬送する第1搬送アームと、第2のワーク授受領域にある第2ワークホルダ32aと第2ワーク収容部22aとの間でワークを搬送する第2搬送アームとを設けた。
(もっと読む)
位置決め装置

【課題】回動駆動機構を設けることなく水平方向に対する移動体の移動量差に応じた回転角度で回転させて位置決めすることができ、装置自体を小型化及び軽量化する。
【解決手段】各電動モータを同期駆動してそれぞれの送りねじ9、11を所要の方向へ回転することにより各水平可動体17、19を一致する送り量で水平方向へ移動させ、水平方向に対する各水平可動体17,19の移動量の差に応じて一対のアーム37,41を平行揺動して取り付け部材35を回転して被位置決め手段を位置決めする。
(もっと読む)
位置合わせ方法、露光方法、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】基板を露光する途中での、基板の取り外しを前提とする基板保持部材の採用を可能にする位置合わせ方法を提供する。
【解決手段】 基板P上に複数の区画領域(SA1、SA2等)を形成するに当たり、基板P上に区画領域を形成する度毎に、基板Pを該基板Pの面に平行な面内でステップ移動し、該ステップ移動の前後で、基板Pの同一の検出対象部(例えばエッジ)の位置情報を例えば複数のセンサ122X1、122X2、122Y1を用いて検出し、その検出結果に基づいて、区画領域の形成の際に、基板Pを露光領域IAに対して位置合わせする。
(もっと読む)
動画像生成装置、動画像生成方法及び動画像生成システム
【課題】基板処理装置を構成する搬送機構が有する基板支持具の設計動作及び検出動作をシミュレートした動画像を生成することにより、基板支持具の異常動作に関する原因判定材料を提供可能な動画像生成装置、動画像生成方法及び動画像生成システムを提供する。
【解決手段】動作データ生成部21bは、受け付けた基板支持具に関する動作の履歴情報2Dに基づいて、基板支持具の検出動作データ4Dを生成する。抽出部21aは、基板処理装置に係るCADデータ1Dから基板支持具の形状データ5Dと設計動作データ6Dとを抽出する。動画像生成装置は、抽出した基板支持具の形状データ5D及び設計動作データ6D並びに生成した基板支持具の検出動作データ4Dに基づいて、基板支持具の設計動作と検出動作とをシミュレートした動画像を生成する動画像生成部21eを備えている。
(もっと読む)
ロボットのアーム構造およびロボット
【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
基板姿勢変更装置および基板処理装置
【課題】基板姿勢変更装置の製造コストを低減すること。
【解決手段】基板姿勢変更装置5は、基板Wを保持している状態で回転軸線L1まわりに回転可能であり、基板Wを保持している状態での重心GCの位置が回転軸線L1に対してずれている保持ユニット6と、回転軸線L1まわりの回転角が異なる複数の位置で保持ユニット6の回転を停止可能であり、前記複数の位置で保持ユニット6を保持可能な回転停止ユニット17と、回転軸線L1に交差する交差方向D1に保持ユニット6を移動させ、交差方向D1に保持ユニット6を加速または減速させる走行ユニット9とを含む。
(もっと読む)
基板搬送用ハンドおよび基板搬送用ハンドを備えた基板搬送装置
【課題】ハンドをカセット内へ進入させることなくハンド上へ基板を載置して搬送すること。
【解決手段】カセットへ基板の出し入れ方向に沿って連結された状態でかかるカセットが備える駆動機構の駆動を受けて回転する受動ローラを備え、かかる受動ローラをその先端部に有する板状のフォークと、上記の受動ローラの回転をかかるフォークに沿って伝達するベルトと、かかるベルトによる回転の伝達を受けて上記の受動ローラと同じ回転方向に回転するその他のローラとを備えるように基板搬送用ハンドおよびかかる基板搬送用ハンドを備える基板搬送装置を構成する。
(もっと読む)
基板搬送装置、これを備える塗布現像装置、及び基板搬送方法
【課題】基板を保持して搬送する基板保持部の位置を検出することにより、基板の搬送を監視することができる基板搬送装置を提供する。
【解決手段】基板を支持する支持部を含む搬送機構と、ラインセンサ、及び該ラインセンサに光を照射する光源を含み、前記搬送機構が動作して前記支持部が移動したときに前記光が前記支持部により遮られ得るように配置される位置検出部と、前記ラインセンサからの信号に基づいて、前記搬送部の位置を検出する制御部とを備える基板搬送装置が提供される。
(もっと読む)
基板搬送方法、基板搬送装置、及び塗布現像装置
【課題】基板搬送装置のバキューム機構に用いられるパッドからの基板のずれを検出可能な基板搬送方法を提供する。
【解決手段】この基板搬送方法では、複数の載置部のうちの一の載置部の基板を保持部で受け取って保持し、保持部に保持される基板を一の載置部から搬出し、保持部に保持される基板の保持部に対する位置(第1の位置)を検出し、保持部に保持される基板を他の載置部に臨む場所まで搬送し、その場所において、保持部に保持される基板の保持部に対する位置(第2の位置)を検出し、第1の位置及び第2の位置に基づいて、搬送前後において生じた、基板の保持部に対する位置ずれ量を算出し、算出された位置ずれ量が所定の範囲に入るか否かを判定する。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】 基板を保持することによる保持体の撓みを抑えること。
【解決手段】 基板を保持するために搬送基体に進退自在に設けられた板状の保持体41の下面に、薄膜状の圧電体5を設ける。この圧電体5は、電圧を印加すると伸長するように構成され、これにより、保持体41に上向きに反る方向の曲げ応力が与えられる。保持体41にウエハWを保持させると、ウエハWの自重により保持体41の先端が下方に垂れるように撓むが、圧電体5に電圧を印加すると、保持体41の下面側が伸長するので、ウエハWの自重による保持体41の撓みに抗して、当該保持体に上向きに反る方向に曲げ応力が与えられ、保持体41の撓みが抑えられる。
(もっと読む)
シート貼付装置および貼付方法
【課題】気泡の混入を極力小さくすることができるシート貼付装置および貼付方法を提供すること。
【解決手段】シート貼付装置1は、接着シートSを繰り出す繰出手段2と、繰出手段2から繰り出された接着シートSを被着体Wの被着面W1に押圧する押圧手段3と、被着体Wと押圧手段3とを相対移動させる移動手段4とを備え、押圧手段3は、接着シートSを被着面W1に押圧しつつ、移動手段4により被着面W1内における第1方向に相対移動する第1貼付動作と、第1貼付動作により貼付された接着シートSを第1貼付動作時よりも大きい押圧力で被着面W1に押圧しつつ、移動手段4により第1方向と交差する当該被着面内における第2方向に相対移動する第2貼付動作とを行う。
(もっと読む)
基板搬送装置の位置調整方法、及び基板処理装置
【課題】調整治具を使用することなく搬送位置調整を行うことが可能な基板搬送装置の位置調整方法を提供する。
【解決手段】基板を搬送する基板搬送部により基板を保持し、基板の位置を検出する第1検出ステップと、基板搬送部により保持される基板を、基板を保持して回転する基板回転部へ搬送するステップと、基板回転部に保持される基板を、基板回転部により所定の角度だけ回転するステップと、基板回転部により回転された基板を、基板搬送部から受け取るステップと、基板搬送部が受け取った当該基板の位置を検出する第2検出ステップと、第1検出ステップで求めた基板の位置と、第2検出ステップで求めた基板の位置とに基づいて、基板回転部の回転中心位置を把握するステップと、把握された回転中心位置に基づいて、基板搬送部の位置を調整するステップとを含む基板搬送装置の位置調整方法が提供される。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】搬送する基板の大きさに応じて基板保持機構の大きさを調整し得る基板搬送装置を提供する。
【解決手段】本発明による基板搬送装置100は、処理台A上の基板Bを搬送する基板搬送装置であって、処理台Aから基板Bを持上げる第1基板持上げ機構110と、基板Bの大きさに合わせて開閉し、持上げた基板Bを保持する基板保持機構120とを備える。さらに処理台Aは、第1固定台A1と第2固定台A2とを含み、基板保持機構120は、第1固定台A1と第2固定台A2との間を移動し、第1基板持上げ機構110と基板保持機構120との協働により、基板Bを第1固定台A1から第2固定台A2に搬送する。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】基板テーブルの移動を駆動するより効率的な方法を提供する。
【解決手段】キャリアと、直交軸X及びYを基準にして画定された平面でキャリアを投影システムに対して移動させる駆動システムとを備え、駆動システムは、Y軸に平行に移動するように構築され、配置されたシャトルと、シャトルをキャリアに接続するシャトルコネクタであって、シャトルに対してX軸に平行な方向にキャリアを移動させることができるようなシャトルコネクタと、Y軸に平行なシャトルの移動を駆動するシャトルドライバとを備え、シャトルはX軸に平行な方向のキャリアの片側だけに位置し、シャトルの1つだけがキャリアに接続され、シャトルドライバ及びシャトルコネクタは、駆動システムによってキャリアに加えられる力のY成分の少なくとも10%を供給するように構成される。
(もっと読む)
アライメント装置及び半導体製造装置
【課題】スループットを向上させることが可能なアライメント装置及び半導体製造装置を提供する。
【解決手段】アライメント装置30は、上から順に配置され昇降する第1〜第4の基板支持部52a〜52dと、第1〜第3の基板を回転させる第1〜第3の吸着部76a〜76cを有し、アライメント位置へと進入する進退部56と、第4の基板を回転させる第4の吸着部76dを有する基部64と、第1〜第4の基板の端部が突き当てられる被突き当て部及び第1〜第4の基板を被突き当て部に対して突き当てる突き当て部を有する基板位置決め部58と、第1〜第4の基板の切り欠き92の位置をそれぞれ検出する第1〜第4の検出器62a〜62dとを備え、第1〜第4の基板支持部52a〜52dのうち、いずれか2つの第1の組及び残りの第2の組がそれぞれ共に昇降する。
(もっと読む)
搬送機構、及び、これを用いた真空処理装置
【課題】大型の基板であっても、安定して搬送することができ、同時に、搬送する基板の下方に充分なスペースを確保することができる搬送機構を提供することにある。
さらに、係る搬送機構によって基板を安定に搬送しながら効率良く真空処理を行いうる真空処理装置を提供することにある。
【解決手段】駆動軸に回転運動を付与する駆動系と、駆動軸に該駆動軸の中央に最も径が大きいコロを有するローラーとを具備し、ローラーに接触する金属ベルトを、駆動系でローラーを回転させることにより進行させて、金属ベルト上の被搬送物を順次移送させることを特徴とする搬送機構であり、及びそれを備えた真空処理装置である。
(もっと読む)
搬送ロボット
【課題】昇降駆動手段において必要となる昇降駆動力を低減することができる搬送ロボットを提供すること。
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
(もっと読む)
パターン形成装置
【課題】 ワークに対するパターン形成を正確に効率良く行いつつ、利便性を高めることができるパターン形成装置を提供する。
【解決手段】 保持部12に保持されたワークwに対する位置検出手段20による位置検出および加工手段30による加工が、保持部12の異なる割出位置において行われるように、保持テーブル10が一方向に間欠回転するように構成されたパターン形成装置1であって、制御手段は、位置検出手段20によるワーク毎の位置検出に基づいて加工座標データを生成し、ワークが装着された保持部12毎に予め設定された個別補正データにより加工座標データを補正して、補正後の加工座標データに基づき加工手段30によるパターン形成を行う。
(もっと読む)
基板処理装置及び基板処理方法
【課題】処理ユニットの設置スペースを小さくして、装置の小型化を図ると共に、基板の処理時間の短縮化及び搬送時間の短縮化によりスループットの向上を図れるようにすること。
【解決手段】ウエハWを加熱するための加熱部50を形成する熱板51と、熱板51の下方に配設され、ウエハを冷却するための冷却部40を形成する冷却プレート41と、上下に配設された加熱部50及び冷却部40と対向する位置に配設され、ウエハWに対して処理液の液膜を形成する複数の現像処理部60と、冷却部40及び現像処理部60に対してウエハWを搬入又は搬出するためのメインアームA1と、メインアームA1から受け取ったウエハWを冷却部40に受け渡すと共に、加熱部50に近接する位置に移動する昇降可能な支持ピン80とを具備する。
(もっと読む)
1 - 20 / 344
[ Back to top ]