
Fターム[5H680BB19]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 種類、型式 (3,145) | 複数の移動子スライダを有するもの (66)
Fターム[5H680BB19]に分類される特許
1 - 20 / 66
駆動装置、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット
駆動装置、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット
慣性駆動アクチュエータ
【課題】2つの移動体を駆動する場合の配線を省線化することのできる慣性駆動アクチュエータを提供する。
【解決手段】1つの電磁石と、電磁石の磁束発生方向に配置された第1移動体と、電磁石の磁束発生方向に配置された第2移動体と、変位発生手段と、電磁石及び変位発生手段を駆動する駆動回路と、を有し、変位発生手段が発生する変位に対して、電磁石から第1移動体及び第2移動体に働く磁力を制御することによって、第1移動体及び第2移動体に対する摩擦を制御する慣性駆動アクチュエータであって、第1移動体及び第2移動体を永久磁石とし、第1移動体及び第2移動体の磁極を互いに逆向きとし、第1移動体及び第2移動体は変位発生手段による変位方向に並んで配置され、1つの電磁石によって第1移動体及び第2移動体を互いに独立して制御する。
(もっと読む)
超音波アクチュエータ

【課題】複数の振動子間の調整が不要であり、小型でありながら強い発生力を有するリニア型超音波アクチュエータを提供する。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された複数の移動体と、駆動部に結合され、複数の移動体に対する把持力をそれぞれ調整可能に構成された複数の伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、を備え、複数の伝達部は、挟持方向において駆動部の一方の端部側に配置されるとともに、駆動部の振動の複数の腹位置にそれぞれ配置されている。
(もっと読む)
多自由度駆動装置
【課題】装置に組み込まれた状態で各振動子の出力特性を揃えることができる多自由度駆動装置を提供する。
【解決手段】複数の振動子11〜13が、複数のパラメータにそれぞれ設定された値に基づいて生成された駆動電圧VA,VBで駆動され、移動体10が移動される。複数のパラメータは、対応する振動子の駆動に応じて可変される値が設定される第1のパラメータと該第1のパラメータと異なる第2のパラメータとを含む。制御部50は、振動子が駆動された際の振動子のそれぞれに対する第1のパラメータの可変された値に基づいて、振動子のそれぞれの出力特性が一致しているか否かを判別する。振動子の出力特性が一致しないと判別された場合に、制御部50は、駆動された振動子のそれぞれの出力特性が一致するように、少なくとも1つの振動子に対して第2のパラメータに設定された値を変更する。
(もっと読む)
注入機器及び超音波モータの制御方法
【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
振動波モータ
【課題】振動子の突起部の振動方向を被駆動体の接触部の変位方向に対応させることができ、振動子の突起部と被駆動体の接触部とを安定的に接触させて駆動することが可能となる振動波モータを提供する。
【解決手段】電気−機械エネルギー変換素子への印加による楕円運動により弾性体に形成された振動子の突起部と接触する被駆動体を相対移動させる振動波モータであって、
被駆動体は環状の移動体で構成され、接触部がバネ性を有する片持ち構造を備え、
弾性体は長方形状に構成され、突起部は該弾性体の長手方向における第一の曲げモードの振動の腹となる位置と振動の節となる位置の間であって、弾性体の長手方向における第二の曲げモードの振動の節となる位置の近傍に設けられ、
振動子の突起部の振動方向が、被駆動体の接触部の変位方向に対応する方向となるように構成されている。
(もっと読む)
超音波振動子、及び超音波モータ
【課題】簡略な構成の超音波振動子及び超音波モータを提供すること。
【解決手段】略直方体形状を呈する当該超音波振動子40の中心軸に垂直な断面を構成する短辺と長辺との長さの比率が、前記中心軸方向に伸縮する縦振動と、前記中心軸を捻れ軸とする捻れ振動と、の共振周波数を略一致させる比率に設定されており、前記縦振動と前記捻れ振動とが同時に励起されることで楕円振動が励起される超音波振動子40を次のように構成する。すなわち、当該超音波振動子40に励起される前記縦振動の節部且つ前記捻れ振動の腹部に対応する位置に配置された積層圧電素子40p振動子40と、前記積層圧電素子40pを前記中心軸方向における一方側と他方側とから挟み込む一対の弾性体である第1の弾性体40e1及び第2の弾性体40e2と、を超音波振動子40に具備させる。
(もっと読む)
2軸駆動装置
【課題】スムーズインパクト駆動機構で小型省スペースな2軸駆動装置を提供する。
【解決手段】本発明の2軸駆動装置は、電圧の印加によって伸縮する圧電素子1a,1bと、圧電素子の伸縮によって変位する駆動軸2a,2bと、駆動軸に対して摩擦係合されて当該駆動軸の軸方向に移動する移動体4a,4bとを備え、各組の駆動軸の軸方向が互いに異なるとともに、各組の圧電素子同士が共通の電極3を介して互いに接合されて一体化されてなる。圧電素子はそれぞれ、その伸縮方向(X,Y)に対して斜めに形成された表面が前記電極に接合される。圧電素子は、直方体の4頂点と内部とを通る平面で前記電極を介して互いに接合された態様で直方体状に一体化される。
(もっと読む)
モータ装置及び回転子の駆動方法並びにロボット装置
【課題】高トルクを発生させることができるモータ装置を提供する。
【解決手段】回転子と、回転子の外周の少なくとも一部に掛けられた伝達部と、伝達部に接続され、印加された駆動電圧に応じて伝達部を移動させる複数の駆動部と、回転子と伝達部との間を回転力伝達状態とする保持力に対応する第1駆動波形を備える第1駆動電圧と、伝達部を移動させる駆動力に対応する第2駆動波形を備える第2駆動電圧とを複数の駆動部にそれぞれ印加させて、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させる駆動動作及び回転力伝達状態を解消した状態で伝達部を所定の位置に戻す復帰動作を駆動部に行わせる制御部と、を備える。
(もっと読む)
電気機械モータに対する法線力の付与
電気機械モータ組立体(1)は、ステータ(30)と、移動対象体(10)と、ステータ支持部(35)とを備える。ステータ(30)は、常に電気機械アクチュエータ(20)のうちの少なくとも1つを確実に対象体(10)と非スライド方式で接触させるステップの反復により対象体(10)を移動させるように構成された複数の電気機械アクチュエータ(20)を有する。組立体は、さらに、少なくとも1つのバネ構成部(42)により、ステータとステータ支持部との間に法線力(N)を加える加力構成部(40)を備える。バネ構成部(42)は、対象体(10)の表面(5)に対する法線方向(Z)に、法線力(N)と、対象体(10)の表面(5)の平均高さ不確定性との比の5%未満となる低いバネ定数を有する。加力構成部(40)は、さらに、主運動方向(X)に平行で、かつ、対象体(10)の表面(5)に対して並置された状態で、ステータ(30)とステータ支持部(35)との間に取り付けられた横固定板(46)を備える。  (もっと読む)
(もっと読む)
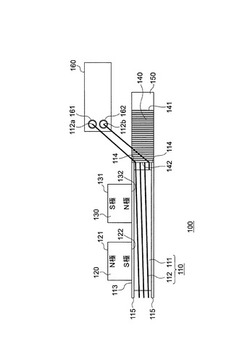
駆動装置
【課題】移動体を複数方向に移動させる。
【解決手段】SIDM装置1は、電圧の印加によって伸縮する圧電素子2と、圧電素子2の伸縮によって変位する柱状の駆動軸3と、圧電素子2の移動を制限しつつ当該圧電素子を伸縮可能に支持するカラー部材4と、駆動軸3に対して摩擦係合されて当該駆動軸3の軸方向Jと、当該軸方向Jとは異なるX軸方向とに移動可能な移動体5とを備える。圧電素子2は、正負同一の電圧を印加した場合の動作方向が互いに異なる2つ以上の圧電体20〜22を有する。
(もっと読む)
駆動装置
【課題】扁平で薄型化可能な駆動装置を提供する。
【解決手段】駆動装置10は、回転軸43に軸止される外径の異なる円盤状のローター4
1a,41b,41cを有するローター車40と、交流電圧を印加することにより面内振
動し、ローター車40を回転する板状の振動体130と、ローター41a,41b,41
cのいずれかの外周側面に振動体130を一定の付勢力で当接させる振動体付勢部材70
と、振動体130の駆動制御を行う制御回路部60と、ローター車40と、振動体130
と、振動体付勢部材70と、制御回路部60とを収納する第1機枠20と第2機枠30と
からなる筐体とを備えている。複数のローターのいずれかを選択し、振動体130を当接
させることにより、ローター車40の回転速度を切換えることができる。
(もっと読む)
アクチュエータおよびそれを用いた位置決め装置
【課題】 簡単な構造で装置の低背化と移動ストロークの拡大が可能なだけでなく、移動の真直性とX−Y方向の直交性に優れたアクチュエータおよび当該アクチュエータを用いた位置決め装置を提供すること。
【解決手段】 磁石31,32と摺動する固定部材36に周期構造を形成し、その周期構造を直交する2軸に対して同一となるようにすることで、磁石31,32と固定部材36との間に働く吸引力に、X−Yの2軸に沿った規則性を持たせ、X−Yの直交する2方向へ真直に移動できるように構成する。
(もっと読む)
アクチュエータおよびそれを用いた位置決め装置
【課題】 簡単な構造で装置の低背化と移動ストロークの拡大が可能なだけでなく、移動の真直性とX−Y方向の直交性に優れたアクチュエータおよび当該アクチュエータを用いた位置決め装置を提供する。
【解決手段】 被駆動部材35において、2つの駆動体41,42を、直交する2軸に対して線対称となるように配置することで、各駆動体の移動方向の傾きを相殺し、各駆動体の2つの電気機械変換素子に、互いに同じ電圧または正負が反転した電圧を印加することで、直交する2軸方向に駆動する。
(もっと読む)
可逆圧電ロータリーモータに基づくバルブ
栓を備えたバルブ本体と、そのバルブ本体と連結して、回転軸の周囲にその回転可能な栓を回転させる様に作動する駆動部本体を備えた圧電バルブが提供される。その回転軸に沿って配置され、前記栓と静的に連結すると共に、前記駆動部本体と回転可能に連結するシャフトを前記駆動部本体は備える。前記軸の周囲に配置され、前記駆動部本体に回転可能に連結するロータアセンブリもまた前記駆動部本体は備える。前記軸の周囲に配置されて前記駆動部本体に静的に連結しており、前記ロータアセンブリの内表面に摩擦係合する様に構成された第1の圧電アクチュエータを前記駆動部本体はさらに備える。加えて、前記軸の周囲に配置されて前記シャフトに静的に連結しており、前記ロータアセンブリの内表面に摩擦係合する様に構成された第2の圧電アクチュエータを前記駆動部本体はさらに備える。 (もっと読む)
振動波モータ
【課題】突起の中で径方向の滑りを低減したい位置の振動の軌跡方向を、移動体の変位方向と略一致させ、摺動損失を低減することができる振動波モータを提供する。
【解決手段】振動波モータは、電気エネルギーを機械エネルギーに変換する変換素子(圧電素子1)に交流電圧を印加することによって、変換素子が結合される振動体2に進行性振動波を発生させ、進行性振動波により振動体2に接触する移動体3を摩擦駆動する。そして、振動体2は、変換素子が結合される基部2aと、基部2aに設けられ、移動体3と接触する接触面を有する突起2bとを備える。また、基部2aの移動体3との接触面側に設けられるとともに、突起2bと接続される支持部2cを備える。支持部2cは、振動体2の中心軸と突起2bの周方向の中心とから定められる面に対して、非対称の位置に形成されている。
(もっと読む)
圧電アクチュエータ
【課題】平行配置された2つの圧電素子に接続された梁状本体部に形成された柱状突起の先端に楕円運動を生起させることで駆動対象に送りを掛けるようにした圧電アクチュエータの動作効率を向上させる。
【解決手段】第1,第2の圧電素子PZT1,PZT2の先端に固着された梁状本体部5の中央から左右に等しい間隔をおいて同一形状同一寸法の2つの柱状突起6,7を設けると共に、梁状本体部5の中央部には柱状突起6,7と逆方向に向けて突出する中央支持体8を設け、第1,第2の圧電素子PZT1,PZT2および中央支持体8の基部をベースプレート11に固着し、何れかの圧電素子を正弦波または三角波からなる高速送り用駆動信号で駆動することにより、柱状突起6,7の先端に位相の異なる楕円運動を生起させ、圧電素子の1振動周期の内に柱状突起6,7を利用して2回の送り動作をかける。
(もっと読む)
駆動装置及び光学装置
【課題】圧電アクチュエータの駆動特性を効率良く取得することができる駆動装置及び光学装置を提供する。
【解決手段】
撮像光学系2を移動させる駆動装置であって、ヨー方向Xに撮像光学系2を移動させるアクチュエータ8と、ピッチ方向Yに撮像光学系2を移動させるアクチュエータ6と、アクチュエータ8、アクチュエータ6をそれぞれの駆動特性に基づいて駆動させる第1制御部30と、アクチュエータ8及びアクチュエータ6のそれぞれの駆動特性を取得する第1制御部30と、を備え、第1制御部30は、撮像光学系2をヨー方向X及びピッチ方向Yに同時に移動させて移動速度を取得し、取得した移動速度に基づいて駆動特性を取得することにより、駆動特性を効率良く取得することができる。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、該縦振動と該ねじれ振動を合成することにより楕円振動を形成し、該楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が矩形状の長さ比率を有する振動子である圧電素子11と、該圧電素子11の楕円振動発生面に接して振動子の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ16と、を少なくとも備えている。そして、上記圧電素子11の回転軸方向に伸縮する縦1次共振振動と、上記回転軸をねじれ軸とするねじれ2次共振振動とを合成することにより、上記楕円振動を形成する。
(もっと読む)
1 - 20 / 66
[ Back to top ]