
Fターム[5H680FF21]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111)
Fターム[5H680FF21]の下位に属するFターム
Fターム[5H680FF21]に分類される特許
1 - 20 / 44
超音波モータの駆動装置
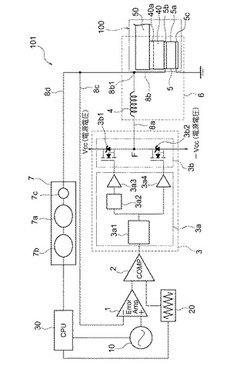
【課題】超音波モータの異常を検出する際の電力の損失を低減することが可能な超音波モータの駆動装置を提供することを課題とする。
【解決手段】超音波モータの駆動装置101は、圧電素子5と、交流発振器10及び圧電素子5に接続され圧電素子5に送る電圧信号を周期的に切り換えるD級スイッチング段3と、D級スイッチング段3及び圧電素子5の間に接続される出力コイル4と、出力コイル4及び圧電素子5の間に接続され出力コイル4及び圧電素子5の間の電圧信号を検出する検知装置7と、検知装置7が検出した電圧信号の周波数が圧電素子5を駆動する電圧信号の周波数より高い場合に、圧電素子5の異常、及び/もしくは出力コイル4と圧電素子5との間の断線を判定するCPU30とを備える。
(もっと読む)
撮像装置

【課題】簡単な回路構成で塵埃除去と焦点検出のそれぞれの目的に合わせて圧電素子を駆動する。
【解決手段】撮像装置は、被写体像を光電変換する撮像素子を含む撮像ユニットと、前記撮像ユニットを振動させるために設けられた圧電素子と、圧電素子に電圧を印加する駆動回路と、撮像素子に付着した塵埃を除去するクリーニングモードを設定する設定手段と、を有する。駆動回路は、前記クリーニングモードが設定される場合には、前記クリーニングモードが設定されていない場合よりも前記圧電素子に印加する電圧を高くする。
(もっと読む)
注入機器及び超音波モータの制御方法
【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】安定した状態で確実に起動し安定駆動状態を維持することができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、振動体1に設けられローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動回路26と、駆動信号と振動体1の振動に基づいて検出される検出信号との位相差を検出する位相差検出回路27と、駆動信号の周波数及び電力を制御する周波数制御器20とを備え、周波数制御器20は、周波数を変化させて、位相差が所定の範囲内となった場合に電圧を上限電圧値に設定し、位相差が所定の範囲外にある場合には電圧を上限電圧値よりも小さい下限電圧値に設定することを特徴とする。
(もっと読む)
電気機械変換素子の駆動装置、モータ装置、及びロボット装置
【課題】駆動精度を向上させる。
【解決手段】電気機械変換素子の駆動装置は、電気機械変換素子に駆動電圧を供給するための電流を、制御信号に基づいて制御する駆動回路部と、電気機械変換素子の駆動電圧を検出する検出部と、駆動電圧の供給を制御する駆動制御信号を駆動回路部に出力する駆動処理、及び、駆動電圧を検出して得られた検出電圧に基づいて駆動電圧を目標電圧に補正する補正制御信号を駆動回路部に出力する補正処理、を実行する制御部と、を備え、制御信号は、少なくとも駆動制御信号及び補正制御信号を含む。
(もっと読む)
超音波モータ
【課題】センシング機能を付加した簡略な構成の超音波モータを提供すること。
【解決手段】超音波モータを次のように構成する。すなわち、被駆動体であるシャフト11と、前記シャフト11が挿通される貫通孔5hが形成されたステータ5と、前記ステータ5に設けられ、前記シャフト11を駆動する為の駆動信号が印加される駆動用圧電素子10と、前記ステータ5において、前記シャフト11の駆動軸方向に沿って長さを有するように設けられ、当該超音波モータの外部環境の状態を検出する為の検出信号を出力する検出用圧電素子15と、を超音波モータに具備させる。
(もっと読む)
駆動装置、レンズ鏡筒、および、撮像装置
【課題】圧電素子を備えている振動アクチュエータを駆動する場合に生じる音を低減させることができる駆動装置を提供する。
【解決手段】圧電素子を備えている振動アクチュエータを駆動する駆動装置が、圧電素子を駆動する場合、第1の期間において第1の時定数で圧電素子を駆動し、第1の期間に続く第2の期間において、第1の時定数よりも時定数の値が小さい第2の時定数で圧電素子を駆動する駆動部、を備えている。
(もっと読む)
超音波モータ及び超音波モータの駆動方法
【課題】超音波モータの始動時において不感帯があるために最低駆動電圧以上の電圧信号を圧電素子に印加しない限り駆動しない。その為、始動時の圧電素子に印加する電圧は大きい電圧が入力されることになり、低い速度にて動かすことができない
【解決手段】一側面に摺動チップが1個以上接着され、1つ以上の駆動電極が形成された複数個の圧電素子と、複数個の圧電素子を保持するケースからなる超音波モータにおいて、少なくとも1個の圧電素子の駆動電極に印加する電圧信号と、他の圧電素子の駆動電極に印加する電圧信号を異なる電圧信号にする。
(もっと読む)
超音波モータ
【課題】超音波モータに余計な負荷をかけることなく、ステータとロータの固着を解除可能な超音波モータを得る。
【解決手段】コサイン波から成る交流電圧が印加される第5のB圧電体321b、第1のA圧電体311a、及び第2のA圧電体312a、第3のA圧電体315a及び第4のA圧電体316a、第9のA圧電体331a及び第7のA圧電体327a、並びに第7のB圧電体325b及び第6のA圧電体324aが、回転軸X正方向に各々変位する。マイナスコサイン波から成る交流電圧が印加される第1のB圧電体313b及び第2のB圧電体314b、第3のB圧電体317b及び第4のB圧電体318b、第7のA圧電体327a及び第8のB圧電体326b、並びに第5のA圧電体323a及び第6のB圧電体322bが、回転軸X負方向に各々変位する。これにより振動部材19の上に波長λの定在波が発生する。定在波の振幅は、進行波の振幅の2倍である。
(もっと読む)
駆動装置、画像取得装置および電子機器
【課題】低電圧駆動で十分な変位レベルが確保できる駆動装置を提供する。
【解決手段】駆動装置は、駆動軸と、駆動軸の一端に固着され、駆動電圧の印加に応じて伸縮する圧電素子42と、駆動軸を軸方向に摺動可能に保持する軸保持部と、圧電素子42に印加する駆動電圧を生成する駆動電圧生成回路81と、を備える。駆動電圧生成回路81は、圧電素子42の一方側電極から駆動電圧を印加する第1駆動回路と、圧電素子42の他方側から駆動電圧を印加する第2駆動回路と、を有し、第1駆動回路と第2駆動回路とを切り替えることで交流駆動電圧を生成する。第1駆動回路の出力段および第2駆動回路の出力段には誘導性素子91、92を有する。駆動電圧の周波数は、第1、第2駆動回路に含まれるスイッチ抵抗、圧電素子42の容量および誘導性素子91、92のインダクタンスの相互作用によって利得がゼロdBより大きくなる周波数レンジから選定する。
(もっと読む)
超音波モータ
【課題】駆動時における異音の発生を低減させた超音波モータを提供すること。
【解決手段】被駆動体5に当接する駆動子10を備える超音波振動子4に2相の駆動信号を印加して縦振動と屈曲振動とを同時に発生させることで、前記超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て前記駆動子10により前記被駆動体5を摩擦駆動する超音波モータを、次のように構成する。すなわち、制御CPU22は、前記2相の駆動信号の位相差である駆動位相差を切り替えて駆動する際に、駆動位相差の切り替えの周期を変化させるよう駆動位相差の切り替えタイミングを制御する。
(もっと読む)
超音波モータ駆動装置
【課題】被駆動体に搭載物を追加しても、超音波振動子にかかる押圧力を一定に保つことを可能とし、これにより動作が安定した超音波モータ駆動装置(XYステージ)を提供する。
【解決手段】縦振動と屈曲振動を同時に励起して楕円振動を発生させ、楕円振動を駆動力として被駆動体を駆動する、複数の超音波振動子を有する超音波モータ駆動装置であって、被駆動体と対向するように超音波振動子に設けられ、被駆動体と接触し被駆動体を平面内の任意の方向に駆動させる駆動子と、被駆動体と超音波振動子との間に作用する押圧力を検出する押圧力検出部と、押圧力検出部による検出結果に基づき押圧力を所定の押圧力に調整する押圧力調整部と、を具備する。
(もっと読む)
容量性素子の駆動装置
【課題】容量性素子に印加される信号の電圧を安定させることができる容量性素子の駆動装置を提供する。
【解決手段】交流信号を生成する信号発生回路2と、前記信号発生回路にて生成された交流信号を増幅して容量性素子6に印加する増幅回路4,5と、前記容量性素子に印加された交流信号の一部を前記増幅回路へ帰還入力する帰還回路7,8と、を備える。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法および電子機器
【課題】高効率な駆動を実現することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】駆動信号の周波数として縦振動と反共振動の共振周波数を有する圧電素子を備える圧電アクチュエーターを以下のように駆動制御する。先ず、駆動開始時は初期駆動制御モードで駆動を制御し、その後、被駆動体のローターが所定量駆動するまでは定常駆動制御モードに切り替えて駆動を制御する。定常駆動制御モードでは、ローターの振動状態に基づいて周波数制御される駆動信号を圧電素子に印加し、かつ、定常駆動制御モードでの駆動を終了する際にその時の駆動信号の周波数を次回駆動時の駆動周波数f0として記憶する。初期駆動制御モードでは、初めに圧電素子に駆動周波数f0よりも低い固定周波数fr1の駆動信号を印加し、その後、予め設定されたタイミングで、駆動周波数f0に固定された駆動信号を印加する。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法および電子機器
【課題】確実な駆動を実現することができる圧電駆動装置、圧電駆動装置の制御方法および電子機器を提供する。
【解決手段】圧電素子を有しこの圧電素子への駆動信号の印加により縦振動および屈曲振動を発生する振動体を備えてこの振動体の振動を被駆動体に伝達する圧電アクチュエーターを以下のように駆動制御する。圧電駆動装置の構成を、圧電素子に所定周波数f0の駆動信号を印加する定常駆動制御モードと、圧電素子に、定常駆動制御モード時の駆動信号の周波数f0よりも、圧電素子のインピーダンスが小さくなる周波数f1の駆動信号を印加する強制駆動制御モードとを切替可能とする。そして、定常駆動制御モードで圧電アクチュエーターの駆動を開始した後、所定時間t0内に駆動検出信号が入力されなかった場合は、強制駆動制御モードに切り替える。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、長期間の駆動を行っても回転特性の低下を抑制することができる圧電モーター、液体噴射装置及び時計を提供する。
【解決手段】圧電体層と該圧電体層を挟んで両側にそれぞれ設けられた第1電極及び第2電極60とを有する圧電素子と、該圧電素子が固定された振動部材と、を有する圧電アクチュエーター10と、前記振動部材の端面が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸側に向かって付勢する付勢手段と、を具備する圧電モーターであって、前記圧電素子に駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部300を有する。
(もっと読む)
圧電アクチュエータの駆動装置
【課題】電源から電源電圧を供給した直後の、駆動回路が駆動する前における第1活性部の充電による駆動回路の故障を防止する。
【解決手段】駆動回路61は、第1給電系統70と接続されており、制御基板60から駆動電位が付与される。コンデンサ81の一端側である中間電極44aは、第1給電系統70から分岐した第2給電系統71と接続されており、制御基板60から直接駆動電位が付与される。コンデンサ82の一端側である下部電極43は、グランドに接続されている。コンデンサ81、82それぞれの他端側である上部電極45は、駆動回路61の出力端子に接続されており、駆動電位とグランド電位のうち、いずれか一方の電位が選択的に付与される。第2給電系統71において、コンデンサ81に対して直列的に抵抗器83が接続されているとともに、コンデンサ81に対して並列的にコンデンサ84が接続されている。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、回転特性を自在に可変することができる圧電モーター、液体噴射ヘッド及び時計を提供する。
【解決手段】振動部材20と、該振動部材20の両面にそれぞれ設けられて、圧電体層40と該圧電体層40を挟んで両側にそれぞれ設けられた第1電極50及び第2電極60とを有する圧電素子30と、を有する圧電アクチュエーター10と、前記振動部材20の当接部21が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸3に向かって付勢する付勢手段80と、を具備する圧電モーター1であって、前記振動部材20の両面に設けられた2つの圧電素子30に、同一の駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部を有する。
(もっと読む)
圧電駆動装置、圧電駆動方法および電子機器
【課題】圧電アクチュエーターの起動時の効率を大幅に向上することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】圧電駆動装置は、圧電アクチュエーターと、駆動制御手段とを備える。駆動制御手段は、圧電アクチュエーターの起動初期に行う初期駆動制御と、初期駆動制御後に行う定常駆動制御S5とを実行する。初期駆動制御では、圧電素子に初期駆動信号を印加する初期駆動信号印加制御S1を実行後、圧電素子に駆動信号を印加しない非印加制御S2を実行する。初期駆動信号印加制御から非印加制御に切り替えるタイミングは、初期駆動信号の印加による被駆動体の動作が開始されるまでに設定し、初期駆動制御から定常駆動制御に切り替えるタイミングは、初期駆動信号の印加による被駆動体の動作開始時以降でかつ被駆動体の動作停止時および/または前記圧電素子の放電完了時までに設定する。
(もっと読む)
超音波モータの速度制御装置、方法及びプログラム
【課題】電流を上昇することなく低速駆動を可能にした超音波モータを提供する。
【解決手段】超音波モータの応答周波数範囲の周波数信号を決定するPID制御部13と、この周波数信号よりも高周波である他の周波数信号を生成する周波数信号生成部14と、この他の周波数信号をもとに、パルス幅を制御したPWM信号を生成するPWM制御部15とを具備した速度制御装置により、超音波モータの制御を行う。
(もっと読む)
1 - 20 / 44
[ Back to top ]