
国際特許分類[B25J15/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686)
国際特許分類[B25J15/00]の下位に属する分類
サーボ作動
ヘッドまたはヘッド部品を遠隔分離または遠隔交換するための装置をもつもの (109)
真空または磁力把持装置をもつもの (534)
指部材を有するもの (881)
国際特許分類[B25J15/00]に分類される特許
1 - 10 / 162
ロボットハンド装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
把持部位置決め装置および方法
【課題】ロボットアームに装着されたワーク把持装置に備えられた把持部を、ロボットやワーク把持装置に把持部を移動させるための駆動装置を設けることなく、ワークの種類の変更に応じて、移動させて位置決めすることにより、ワーク把持装置における把持部の位置を自動的に変更する。
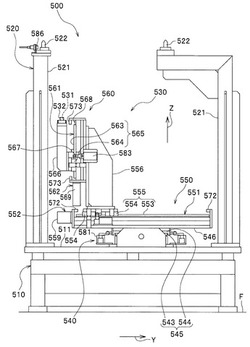
【解決手段】把持部位置決め装置500は、ベースユニット510を有しており、ベースユニット510には、移動が許容された状態と規制された状態とに切り替えられ得る把持機構を備えたワーク把持装置を位置決めするワーク把持装置位置決め部520と、把持機構と係合可能な係合凹部531を備えワーク把持装置1における移動が許容された状態にある把持機構と係合した係合凹部531を3次元移動させることにより把持機構をワークの種類に応じて当該ワークの被把持部に対応した位置に移動させて位置決めする把持部位置決め機構530と、が設けられている。
(もっと読む)
把持部位置決め治具

【課題】ロボットアームに装着されたワーク把持装置に備えられた把持部を、ロボットやワーク把持装置に把持部を移動させるための駆動装置を設けることなく、ワークの種類の変更に応じて、作業者が移動させて位置決めして、ワーク把持装置における把持部の位置を容易かつ確実に変更する。
【解決手段】ワーク把持装置1における把持機構11をワークの種類に応じて移動させて位置決めするための把持部位置決め治具400は、ワーク把持装置1における移動が許容された状態と規制された状態とに切り替えられ得る把持機構11と係合可能な係合凹部420が、ワークの種類に応じて把持機構11により把持される当該ワークの被把持部に対応した位置に設けられた治具プレート401と、ワーク把持装置1に対して治具プレート401を位置決めするための治具本体位置決め部402と、を備えている。
(もっと読む)
ロボット
【課題】小型でありながら、大きな対象物を把持可能なロボットを提供する。
【解決手段】ロボットの第1アームの先端には第1の動作を行う第1動作部を取り付けておき、第2アームの先端には第2の動作を行う第2動作部を取り付けておく。そして、第1アームの側面または第1動作部の側面の少なくとも一方と、第2アームの側面または第2動作部の側面の少なくとも一方とには、対象物を挟持するための挟持部を設けておき、大きな対象物については、第1アームの側の挟持部と第2アームの側の挟持部とで挟持することによって把持する。こうすれば、大きな対象物を把持するためのアームを備える必要がないので、ロボットを小型化することができる。
(もっと読む)
基板搬送用ハンドおよび基板搬送ロボット
【課題】製造コストの削減および軽量化を図るとともに複数枚の基板を同時に搬送することができること。
【解決手段】基板搬送用ハンドは、第1の載置部と、第2の載置部とを備える。第1の載置部は、所定の高さの載置面にて基板を支える複数の支持部を含み、第2の載置部は、第1の載置部の載置面の高さよりも上方の載置面にて基板を支える複数の支持部を含み、該支持部のうち1または複数は退避可能である。第1の載置部に基板を載置し、さらに、第2の載置部に別の基板を載置するよう基板搬送用ハンドを構成する。
(もっと読む)
基板保持部材、基板搬送アーム及び基板搬送装置
【課題】磨耗量低減、汚染防止、アライメント精度向上、又は飛び出し防止の機能を備えた基板保持部材、基板搬送アーム及び基板搬送装置を提供する。
【解決手段】基板搬送装置の基板搬送アームに取り付けられ、基板の周縁を載置して該基板を保持する基板保持部材であって、基板の裏面に当接して該基板を保持する裏面保持部と、基板の端面に当接する端面当接部と、前記裏面保持部及び前記端面当接部が取り付けられ、一体的に前記基板搬送アームに取り付け可能な基板保持部材本体部とを有し、前記端面当接部は、載置する基板の半径方向に変形可能に、前記基板保持部材本体部に取り付けられることを特徴とする。
(もっと読む)
物品保持装置
【課題】物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置1は、ロボットアーム5の先端部に取り付けるベース体11と、このベース体11に対して昇降する昇降体12とを備える。物品保持装置1は、物品Wの上面を吸着保持する吸着保持体21と、昇降体12と吸着保持体21とを連結する可撓性連結体22とを備える。物品保持装置1は、吸着保持体21が上面を吸着保持した物品Wを両側方から挟持してセンタリングする対をなす挟持体51を備える。可撓性連結体22は、金属製のワイヤである。
(もっと読む)
基板搬送装置、基板処理システムおよび基板搬送方法、ならびに記憶媒体
【課題】真空において熱をともなう処理を行う基板処理装置において、基板を高速で搬送しても基板の位置精度を高くすることができること。
【解決手段】熱をともなう真空処理が行われる真空処理ユニットに対して基板の搬入および搬出を行う基板搬送装置は、基板を位置決めする位置決めピンを有し、基板を位置決めした状態で保持するピックと、ピックにより真空処理ユニットに対して基板を搬入および搬出するようにピックを駆動させる駆動部と、ピックによる基板の搬送動作を制御する搬送制御部とを有し、搬送制御部は、基板を真空処理ユニットに搬入する際の、常温における基板の基準位置情報を予め把握しておき、実処理において、基板を真空処理ユニットに搬入する際に、その基板の基準位置からの位置ずれを算出し、位置ずれを補正して基板を真空処理ユニットに搬入するように駆動部を制御する。
(もっと読む)
把持爪、ハンド、ハンド対および把持装置
【課題】簡単な装置構成で、可撓性の長尺線状物を収容時の湾曲した状態から元の直線状態に容易にのばすことができ、作業効率を向上させることのできる把持爪、ハンド、ハンド対および把持装置を提供する。
【解決手段】本発明の把持装置は、非直線状態の長尺線状物を把持可能なハンド対と、前記ハンド対を相対的に移動させるハンド移動部と、を備え、前記ハンド対として、前記長尺線状物を第一把持力で把持する第一部位と、前記長尺線状物を前記第一把持力よりも相対的に小さい第二把持力で把持する第二部位と、を有し、非直線状態の長尺線状物を把持する一対の把持爪を備えるハンド対を具備する。
(もっと読む)
グリッパ
【課題】ワークの把持を迅速に行うことを可能にしたグリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12と、把持部12内の圧力を所定負圧に減圧し、かつ大気圧に戻すことができる減圧装置9と、把持部12と減圧装置9を、固定部材11の内部を経由して接続するチューブ13とを有し、把持部12は、把持部12と固定部材11との間に位置し、粒体12bがチューブ13に入り込むことを防ぐためのフィルタ15を有し、フィルタ15は、減圧装置9による把持部12内の減圧時又は加圧時において空気を透過可能であって、かつ、把持部12内部に突き出している形状であり、形状の空気透過部分の面積は、チューブ13の断面積よりも大きい面積を有している。
(もっと読む)
1 - 10 / 162
[ Back to top ]