
国際特許分類[B25J9/22]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 記録または再生システム (483)
国際特許分類[B25J9/22]に分類される特許
1 - 10 / 483
シナリオ生成装置およびシナリオ生成方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
操作装置および可動機械制御システム
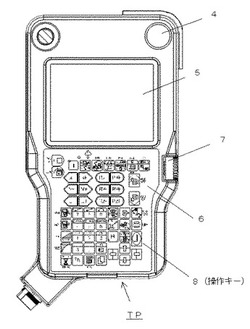
【課題】操作装置に印字されたキー名称が、作業者が使用する言語で表現されていない場合、操作を誤る可能性がある。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
(もっと読む)
人物誘導ロボット

【課題】人物を的確に認識すると共に、その人物を確実に目的地に誘導することのできる人物誘導ロボットを提供する。
【解決手段】ロボットR1の周囲における静止中または移動中の人物を認識する人物認識手段100と、ロボット自体を移動させる移動手段200と、誘導すべき人物に対して、誘導に必要な情報を移動経路を構成する床面または移動経路周辺の壁面に投影して表示する表示手段300と、該表示手段で表示された表示内容に対する誘導すべき人物による入力指示を検出する検出手段400と、検出手段によって検出された入力指示に基づいて、移動手段および表示手段を制御する制御手段500とを備える。
(もっと読む)
ダイレクト教示データの編集方法とパラレルリンクロボット
【課題】直感的で分かりやすいダイレクト教示の特徴を活かしながら、動作確認と再教示との繰り返しを減らすことが可能なダイレクト教示データの編集方法を提供することを目的とする。
【解決手段】パラレルリンクロボットの姿勢に関する教示データのうちの編集領域(21)の教示データを、前記パラレルリンクロボットを動かしてダイレクト教示された再教示データに更新して編集するに際し、前記再教示データ(p1,p2,〜,pn−1)を、前記編集領域(21)の直前の教示データ(P0)で決定される位置および姿勢に応じたオフセット量(Δ)だけオフセット(p1−Δ,p2−Δ,〜,pn−1−Δ)させた後に前記編集領域(21)の教示データとして編集する。
(もっと読む)
組み付け装置、およびその方法、組み付け動作プログラム
【課題】本発明は、被組み付け部品の位置ずれに関わらず、組み付け動作を適切、かつ、効率的に行うことができる組み付け装置、およびその方法、組み付け動作プログラムの提供を目的とする。
【解決手段】本発明にかかる組み付け装置は、制御部2が、組み付け部品100の3次元モデルデータにおいて規定された組み付け部品100の第1基準点に対応する第1基準位置としてのTCP把持位置201と、被組み付け部品101の3次元モデルデータにおいて規定された組み付け部品100の第2基準点に対応する第2基準位置としてのTCP組み付け位置202とを対応させるように、作業部1の動作を制御する。
(もっと読む)
ロボットプログラミング装置
【課題】オフラインロボットプログラミング装置で作業者の修正作業を排除する。
【解決手段】ロボットプログラミング装置(10)は、ワーク(14)の三次元モデル上で加工線(41)を指定する加工線指定部(21)と、加工線に基づいて生成される教示点の動作形式等を指定する動作形式指定部(22)と、加工線および動作形式等に基づいてロボット(12)のプログラムを生成するプログラム生成部(23)と、ワークに直接接触するツールの一部分以外のツール非加工部位を干渉対象として指定する干渉対象指定部(24)と、教示点におけるロボット等とワーク等との干渉を検出する干渉検出部(25)と、干渉時にロボットの位置からツール先端点を並進移動することにより、ロボット等とワーク等とが干渉しない非干渉位置を検索する非干渉位置検索部(26)と、検索結果に基づいて教示点の位置を修正する修正部(27)とを含む。
(もっと読む)
ロボットシステムおよび加工品の製造方法
【課題】スループットの向上を図ること。
【解決手段】上記した課題を解決するために、把持機構を含むロボットと、指示部とを備えるようにロボットシステムを構成する。上記のロボットは、被加工品の加工に用いる複数種類の供給材のうち1つを把持し、上記の指示部は、同一の被加工品の加工に複数の供給材を用いる場合に、前回の被加工品の加工の最後に把持した供給材を、次回の被加工品の加工の最初に用いる動作を上記のロボットへ指示する。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、並びに、集積電子回路
【課題】ロボットの手先から分離した把持部を浮遊させた状態で移動しつつ、軌跡を教示するフロート教示では、操作者は教示中に手を離すことができない。
【解決手段】把持部を固定状態と浮遊状態とを切替えながら教示を行うことができるロボットアームの教示装置を提供する。
(もっと読む)
ロボットアームの教示装置、ロボット装置、教示方法、ロボットアームの制御装置、ロボットアームの制御プログラム、並びに、集積電子回路
【課題】教示時に安全で操作感が良く、作業軌跡を生成できる、ロボットアームの教示装置、ロボット装置、教示方法、ロボットアームの制御装置、ロボットアームの制御プログラム、並びに、集積電子回路を提供する。
【解決手段】ロボット1010Aが測定精度が悪い状態にあるときには、操作部1020を振動させることで人に通知するか、精度を要しない作業しか完成できない状況を構築するかをしておき、その間に、測定精度が良い状態になるようにロボット1010Aを移動する。
(もっと読む)
動作プログラム作成装置、プログラム、ロボット制御システム及びロボットシステム
【課題】 複数のアームを有するロボットのエンドポイントを、第1の目標位置から第2の目標位置に移動させるための動作プログラムを作成できる動作プログラム作成装置等の提供。
【解決手段】 動作プログラム作成装置100は、複数のアームを有するロボットに対する命令を構成要素とする候補プログラム情報を記憶する記憶部120と、候補プログラム情報に基づきロボットの動作プログラムを作成するプログラム作成部110を含む。記憶部120は、第1の目標位置から第2の目標位置に、ロボットのエンドポイントを移動させるために用いられる候補プログラム情報として、使用されるアームが異なる複数の候補プログラム情報を記憶する。プログラム作成部110は、記憶部120に記憶される複数の候補プログラム情報の中から、使用プログラム情報を選択する選択処理を行い、動作プログラムを作成する。
(もっと読む)
1 - 10 / 483
[ Back to top ]