
国際特許分類[B62D101/00]の内容
国際特許分類[B62D101/00]に分類される特許
1 - 10 / 3,423
ヨー応答ゲインの評価方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電子制御装置、および、これを用いた電動パワーステアリング装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両のパワーステアリング制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電動パワーステアリング用モータの故障診断装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用操舵装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用操舵装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
操舵制御装置
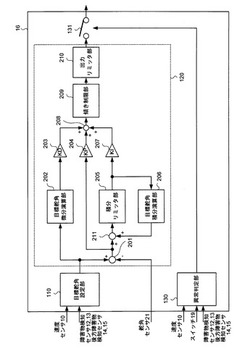
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
自動車

【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
車両姿勢制御装置
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
車両用操舵装置
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
1 - 10 / 3,423
[ Back to top ]