
アクチボラゲット エス ケイ エフにより出願された特許
1 - 10 / 13
ロッド引張り装置、そのためのリム、それを用いた引張りシステム

【課題】半径方向にコンパクトな引張り装置を提供することを課題とする。
【解決手段】引張り軸力(F)を生ずるアクチュエータ(6)と、該アクチュエータ(6)からねじロッド(1)のねじ部(1b)へ該軸力を伝達するタイロッド(7)と、ロック要素(42)とを有するロッド引張り装置(2)である。上記タイロッド(7)は、該タイロッド(7)が、ねじロッド(1)のねじ部に係合する閉位置と、爪部(27)がねじロッド(1)のねじ部(1b)から解放される開位置との間を、半径方向に可動となっており、上記ロック要素(42)は爪部(27)の周囲で軸方向に滑動可能なスリーブ(43)を有し、該スリーブ(43)が爪部(27)の対応外面と接触する切頭円錐内面(45)を有していることを特徴とする。
(もっと読む)
ステアリングコラムの軸におけるトルク検出装置

軸によって伝達されるトルクを検出する装置10は、捩り要素11、捩りを受けている弾性捩り要素の両端へ角度方向に接続された二つのエンコーダ29,30、センサ組立体、そして、軸に作用するトルクを表わす一つの信号を発生するセンサ組立体を支持する電子回路基板14を有する。 (もっと読む)
一つもしくは複数のボルトの流体圧による緊締そして制御を行なう方法及び装置
【課題】一つもしくは複数のボルトの流体圧による緊締そして制御を行なう方法及び装置を提供する。
【解決手段】ねじあるいはスダッド型の少なくとも一つのシャンク(4)の緊締部(34)に軸方向の予荷重を付与しこの予荷重を確認する方法である。予荷重の付与は、シャンク(4)を把持する把持手段(9)とテンショナ(6)を用いて、緊締部(34)を有するシャンク(4)の延長部(33)を伸長する工程でなされる。確認方法は、予荷重の付与に先立ち、テンショナが静置状態とされ、把持手段(9)が上記静置状態のテンショナ(6)と接するようにもたらされる工程と、予荷重の付与完了後に、テンショナ(6)が上記静置状態に戻され、該静置状態のテンショナが延長部(33)の両端部の一方に向け圧せられ、延長部(33)の初期長(Liθ)と最終長(Lfθ)の差が閾値と比較される工程でなされる。
(もっと読む)
ねじロッドを引張るための装置
平行な複数のねじロッドに引張力を与える装置であって、軸方向引張力を生ずることのできる複数のアクチュエータ4,5を有し、各アクチュエータ4,5が複数のねじロッドのうちの一つのねじロッドの一端へ引張力を伝えるための引張りロッド19と協働し、該装置は、同心の下クラウン3及び上クラウン2と、下クラウンに形成された複数の下液圧チャンバ及び上クラウンに形成された複数の上液圧チャンバと、各液圧チャンバ15に配された環状の作動ピストン14とを有し、下液圧チャンバ内のピストンと上液圧ピストンの軸線が隣接せる軸線との間の距離が上記ピストンの直径よりも小さい距離となるように設定されていることとする緊締装置。 (もっと読む)
ボール軸受のための保持器及びころがり軸受組立体
環状の基部7と、ボールのためのポケット9を形成する爪部11が設けられ上記基部7に連結されたアキシャル部8とを有し、該アキシャル部がほぼ軸方向に延びているボール軸受のための保持器において、アキシャル部8はポケットの直径の半分より大きくあるいは等しい長さにわたり軸方向に延びており、上記アキシャル部8は基部7の外径よりも小さい外径を有し、アキシャル部の外径は保持器のピッチ円直径から基部の半径方向寸法の半分を減じた値と、保持器のピッチ円直径に基部の半径方向寸法の半分を加えた値との間にあることを特徴とするボール軸受のための保持器。 (もっと読む)
計測機能付きころがり軸受装置
回転輪5と、非回転輪4と、センサユニット11を備えた検出組立体3とを有し、該センサユニットは外側環状部分11bと該外側環状部分11bで非回転輪上に位置しているセンサユニット11を軸方向に保持する保持手段とを有している計測機能付きころがり軸受装置において、外側環状部分11bの外径が非回転輪のラジアル端面4bの内径よりも小さいことを特徴とする計測機能付きころがり軸受装置。 (もっと読む)
電動機用軸支持装置、電動機および同製造方法
電動機用軸支持システム、電動機および同製造方法である。電動機1用の軸支持システム7であって、内輪33および外輪34を有する転がり軸受け17と、内輪の角度位置を検出するための少なくとも一つの角度位置センサー20と、内輪に取り付けられたエンコーダ19と、軸受の外輪を支持するためのフランジ16と、フランジによって支持されている処理モジュール18と、を備えている軸支持装置7。  (もっと読む)
(もっと読む)
差分比較によって絶対角度位置を検出するためのシステム、ころがり軸受および回転機械
差分比較によって絶対角度位置を検出するためのシステム、ころがり軸受および回転機械である。非回転要素に対する回転要素の角度位置を検出するためのシステムは、2以上のP個の極をもち、回転要素および非回転要素のうちの一方に取り付けられる環状コーダと、該コーダから発せられた信号を受信可能であり、上記回転要素または非回転要素と対向する他方の回転要素または非回転要素に角度をもって分布配置された奇数かつ3以上のN個のセンサと、該センサからの少なくとも二つの出力信号を処理して差分信号の生成可能な少なくとも一つの減算部とを有している。 (もっと読む)
鑞接もしくは半田結合部を有する軸受ユニット
軸受ユニットのような構造ユニットが、鑞接あるいは半田結合部(14,15,22)を有する結合手段(11,18,24,28)によって互に結合された二つの金属手段部分(9,10;17,19)を有している。結合手段は、また、少なくとも一つのさらなる結合部、例えば、溶接結合部(16,27)、ねじ結合部(30)、接着あるいは塑性形成結合部を有している。  (もっと読む)
(もっと読む)
ころがり要素軸受に作用する接触力ベクトルを決定するための方法及びそのためのセンサ装置
運転中のころがり要素軸受(1)に作用する接触力ベクトルを決定するための方法そして装置である。センサ信号は、ころがり要素軸受(1)の運転特性を測定す複数のセンサ(8)から得られる。複数のセンサ信号は接触力ベクトルを決定するために処理される。複数のセンサ(8)は、軸受の部材の変形を測定するように配され、処理の工程は、ころがり要素軸受(1)を表わす有限要素解析モデルの逆変換を用いて接触力ベクトルを決定する工程を含む。有限要素解析モデルは、少なくとも一つの一般化モード形を用いて簡単化され、少なくとも一つの一般化モード形は、内輪(6)あるいは外輪(5)のようなころがり要素軸受(1)の部材の自然モード変形の数学的表記である。 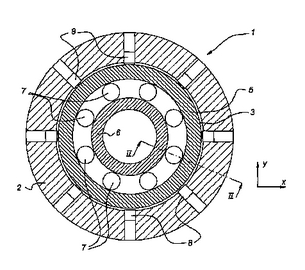 (もっと読む)
(もっと読む)
1 - 10 / 13
[ Back to top ]