
株式会社マルエム商会により出願された特許
1 - 3 / 3
ロボットハンド
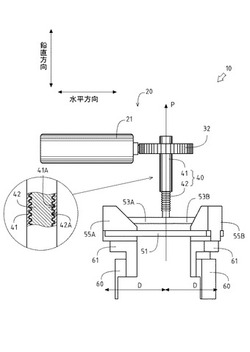
【課題】把持ストロークを可変にしつつ、軽量化かつ小型化できるロボットハンドを提供する。
【解決手段】ワークを把持するロボットハンド10であって、水平方向に配置されるサーボモータ21と、鉛直軸Pを中心とする平面視における仮想円Rの円周上に配置される複数のツメ60と、サーボモータ21の水平軸周りの回転を、鉛直軸P周りの回転に変換する第1変換機構30と、鉛直軸P周りの回転を、鉛直軸P方向の直線移動に変換する第2変換機構40と、鉛直軸P方向の直線移動を、仮想円Rの径方向Dの直線移動に変換する第3変換機構50と、を具備し、ツメ60は、第3変換機構50によって、仮想円Rの径方向Dに移動する。
(もっと読む)
成形型予熱装置及び成形型予熱方法

【課題】成形型をより均一に加熱することができる成形型予熱装置を提供する。
【解決手段】
本発明の成形型予熱装置10は、キャビティ230と、キャビティ230に連通する連通孔254、224を備えた成形型200を予熱する。この成形型予熱装置10は、加熱した気体を前記連通孔254、224からキャビティ230内に導入する。これによって、キャビティ230の表面を加熱する。加熱した気体をキャビティ230内に送り込めば、火炎を用いる場合のようにキャビティ230の表面が局所的に高温となったりすることがない。したがって、キャビティ230の表面を均一に加熱することができる。
(もっと読む)
解砕分級方法及び解砕分級装置
【課題】コンパクトな1台の装置で単粒子を含む被解砕物を解砕分級できる解砕分級方法及び装置を提供する。
【解決手段】単粒子を含む被解砕物を振動する円筒状容器8からなる解砕室10で解砕して分級する解砕分級方法において、被解砕物を振動する円筒状容器10からなる解砕室10で解砕された解砕物を解砕室10の内周面に設けられた螺旋状の搬送路14で下方から上方へ搬送し、最上段の螺旋状搬送路上に配置されたゲート15と螺旋状搬送路14との間に形成されたスリットを通過した単粒子を円筒状容器8の外側に配置された搬送樋17へ移動させて取り出し、スリットを通過しない被解砕物を解砕室10に落下させて再び解砕室10で解砕する。
(もっと読む)
1 - 3 / 3
[ Back to top ]