
カール ツァイス インドゥストリエレ メステヒニク ゲゼルシャフト ミット ベシュレンクテル ハフツングにより出願された特許
1 - 10 / 11
透過する放射線を用いて計測対象の三次元画像を生成するための方法および計測装置
透過する放射線を使った計測対象の三次元画像の生成方法であって、特に多数の二次元投影画像を考慮した逆投影による方法において、計測対象は、計測装置の計測スペースにおいて透過する放射線により貫通され、その際透過する放射線は計測装置の放射源から発し、計測対象の投影画像の最初のセットが、計測装置の検出装置によって撮影され、その際投影画像は、放射源に対して相対的におよび/または検出装置に対して相対的に様々な計測対象の向きで撮影され、投影画像の最初のセットから、計測対象の最初の三次元画像が再構築され、最初の三次元画像は評価され、場合によっては評価の結果によって、計測対象の位置および/または向きが、放射源に対して相対的におよび/または検出装置に対して相対的に変更され、および/または評価の結果により計測装置の運転方法が、あとに続く計測対象の投影画像の撮影のために調節され、最初の三次元画像の評価の後に、計測対象の投影画像の第二のセットが計測装置の検出装置により撮影される方法に関する。  (もっと読む)
(もっと読む)
座標測定器の動作制御
本発明は、例えば、最大速度、最大加速度、移動範囲の限界位置又は信号検出の限界値などの、動作中有効性を保持すべき少なくとも一つの動作パラメータを算定する、座標測定器(11)の動作を制御する方法に関する。座標測定器(11)の複数のコンポーネント(11,12,13,14,16,17,18,19)にそれぞれ動作パラメータの値、動作パラメータを算定するための規則及び動作パラメータを算定するための情報の中の一つ以上を割り当てる。複数のコンポーネント(11,12,13,14,16,17,18,19)に対して、動作パラメータの算定シーケンスを規定する。規定された算定シーケンスで動作パラメータを算定する際、各コンポーネント(11,12,13,14,16,17,18,19)に対して、次の措置を実施するものとして、シーケンスの第一の位置に有るコンポーネント(11)から開始し、i)動作パラメータの値がコンポーネント(11,12,13,14,16,17,18,19)に割り当てられている場合には、その値を動作に関して有効な動作パラメータの値として採用する措置、ii)動作パラメータの値がコンポーネント(11,12,13,14,16,17,18,19)に割り当てられていない場合には、それまでの有効な動作パラメータの値を引き続き有効なままとする措置、iii )シーケンス内に更に別のコンポーネント(12,13,14,16,17,18,19)が存在する場合、そのコンポーネントに関して前記の措置を繰り返す。  (もっと読む)
(もっと読む)
電磁ビームを発生する装置及び装置の動作方法
本発明は、装置が、電磁ビーム、特にX線ビーム又は極端紫外線ビームを発生するように構成されており、その際、粒子、特に電子が、調節可能な集束装置(22)によってターゲット(5)に向けて転向されるので、粒子によってターゲット(5)において電磁ビームが発生され、少なくとも1つの対象物、特に校正対象物(70)が、電磁ビームによって通過照射され、かつ対象物の通過ビーム画像が撮影され、1つ又は複数の通過ビーム画像が自動的に評価され、かつ評価に依存して、集束装置(22)が調節される装置の動作方法に関する。  (もっと読む)
(もっと読む)
座標測定器による表面のスキャニング
本発明は、座標測定器(23)を用いて、加工物の表面を走査する方法であって、座標測定器(23)の走査部品(64)が、当該の表面と接触するとともに、走査部品(64)が、当該の表面に沿って接触を維持しながら移動(スキャニング)する方法に関する。座標測定器(23)には、加工物に関する走査部品の実行可能な動きの互いに独立した複数の自由度、例えば、直線軸の自由度が存在する。それらの自由度に関して、各自由度に関する走査部品(64)の移動速度成分の最大値を表す最大速度値を定義する。加工物の計画しているスキャニングに関して、そのスキャニングの際に走査部品(64)を動かすべき予測経路(スキャニング経路)を予め規定し、その場合実際のスキャニング経路が、加工物の実際のサイズに依存して、この予測したスキャニング経路からずれる可能性が有る。異なる自由度に関する最大速度値を考慮して、走査部品(64)の速度値を一定として、予測したスキャニング経路を通過させて行くことが可能なスキャニング速度の最大値を計算する。  (もっと読む)
(もっと読む)
座標測定機の速度の確実な監視
本発明は、可動な座標測定装置(22)の速度の確実な監視に関する。速度の第1値が、座標測定システム(22,24,25,26,28)の測定値から計算される。この場合、これらの測定値は、前記座標測定装置(22)の位置に関する情報を有する。この場合、さらにこれらの測定値は、測定対象物の座標を測定するために使用される。速度の第2値が、少なくとも1つの追加の運動センサ(TG)の測定信号から算出される。この場合、さらにこれらの測定信号は、前記座標測定装置(22)の駆動装置(M)を制御する時に使用され得る。予め規定した基準にしたがう第1値及び/又は第2値が、互いに目標値及び/又は限界値から外れる時に、エラー信号が生成され得る。  (もっと読む)
(もっと読む)
座標測定機械及び座標測定機械を操作するための方法
本発明は、座標測定機械を操作するための方法及び座標測定機械に関し、この場合、少なくとも1つの電気モータMによって駆動される座標測定機械の座標測定装置、特に測定ヘッドは、少なくとも1つの方向に動くことが可能である。電気モータMの運動、このようにして、座標測定装置の運動を行うために、電気モータMを通して(ラインC11、C21の電流回路を介して)流れる駆動電流が測定される。電気モータMの運動又は座標測定装置5の運動が進行すべき目標速度に基づいて及び/又は目標加速度に基づいて、駆動電流について限界値が検出される(コンピュータPC及び/又はマイクロコントローラMCで)。駆動電流が検出された限界値IΤに達した場合及び/又は駆動電流が検出された限界値IΤを超えた場合、例えば、コンピュータPC又はマイクロコントローラMCが、電流回路に配置されたスイッチSW1、SW2の一方をオフにすることによって、座標測定装置5は所定の状態に設定される。 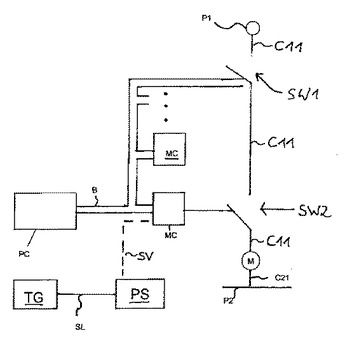 (もっと読む)
(もっと読む)
コンピュータ断層撮影用測定装置および方法
本発明は、コンピュータ断層撮影(CT)用の測定装置および方法に関する。該測定装置は、侵襲的放射線、特にX線を生成するための放射源(2)と、回転機構(7)とを有し、該回転機構の構成および配置が、測定対象(1)が回転機構(7)の回転軸(T)を中心に回転することができ、さらに、このように回転することで侵襲的放射線がさまざまな方向から測定対象(1)を貫通することができるような構成および配置である。さらに、測定対象(1)を貫通した放射線を検出するための検出機構(3)が備えられている。調整機構を具備する位置決め機構(5)が、測定対象の位置を検出機構(7)に相対して調整できるように構成されている。  (もっと読む)
(もっと読む)
侵襲性放射を用いて測定対象を検査するための方法及び装置
本発明は、測定対象(1)に侵襲性放射が照射される、測定対象(1)を検査するための方法及び装置に関し、その際、放射線源(3)からの侵襲性放射の相互作用が、放射感受性を有するセンサ装置(6)を用いて検出され、その際、センサ装置(6)の期待検出結果が、測定対象(1)の設定形状寸法を用い、かつ材料特性を用いて算定装置(13)によって算定され、及び/又は期待検出結果が、マスタ部品を寸法測定することによって得られ、該期待検出結果が、センサ装置(6)の実際の検出結果と比較装置(11)によって比較される。  (もっと読む)
(もっと読む)
被検対象物の材料界面を決定するための方法及び装置
本発明は、被検対象物(1)の材料界面を決定するための方法及び装置に関し、透過放射線を用いて、画像データの画像値を取得することによって被検対象物(1)の三次元画像データを生成するか、或いは取得して置いた画像データの画像値によって被検対象物(1)の三次元画像データを取得し、被検対象物(1)に対して相対的に、画像データを評価するための評価線(17)を決定し、評価線(17)の方向における画像値の第1の部分導関数の絶対値が材料界面の位置に極大値を有するように、この評価線に沿って存在する画像値を評価することによって、被検対象物(1)の材料界面の位置を決定するものである。  (もっと読む)
(もっと読む)
ワークピースの座標を確定するための方法
本発明は、ワークピース(9)に対して不動に位置決めされている第一座標系を固定すること、 ワークピース(9)の第一座標を、第一座標測定装置(3)を使用することにより測定すること、 ワークピース(9)の第二座標を、第二座標測定装置(5)を使用することにより測定すること、そして 第一座標と第二座標から、共通の座標組を、ワークピース(9)に不動に位置決めされた座標系に対する第一座標系においてあるいは第二座標系において作ることを特徴とするワークピース(9)の座標を確定するための方法に関する。特に多数のワークピース(9)の座標はワークピース(9)の製造工程および/または加工工程の最中および/または後に確定することができる。さらに本発明はワークピース(9)が両座標測定装置(3,5)を用いた測定の間に位置および/または姿勢が変化する場合にも関する。  (もっと読む)
(もっと読む)
1 - 10 / 11
[ Back to top ]