
オートモティブ・ディスタンス・コントロール・システムズ、ゲーエムベーハーにより出願された特許
1 - 2 / 2
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
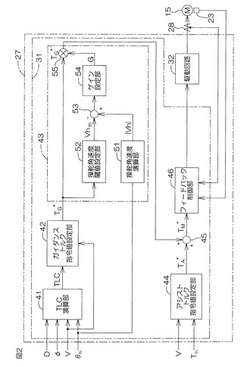
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
操舵支援装置

【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
1 - 2 / 2
[ Back to top ]