
コマウ・ソシエタ・ペル・アチオニにより出願された特許
1 - 10 / 10
少なくとも1つの共通の領域を含むそれぞれの作業スペースを有する少なくとも2台のロボットを制御する方法
【課題】2台のロボットを制御する方法であって、共通作業領域におけるロボット間の干渉を防止する。
【解決手段】作業スペースは、存在する物体を考慮して単純な形状によって構成された、禁止干渉領域、監視干渉領域、ハイブリッド干渉領域に分類される干渉領域を規定することによってモデル化される。各ロボット3,4は、ハイブリッド干渉領域に進入するときに、進入予約の第1出力信号、および進入/存在の警告の第2出力信号を中央電子制御ユニット7に送信するように構成され、ハイブリッド干渉領域のステータスは、ハイブリッド干渉領域に他のロボット3,4が存在するか否かに応じて、ハイブリッド干渉領域をロボット3,4に対して監視または禁止された状態にするロボット3,4への入力信号を、中央電子制御ユニット7から送信することによって、ロボット3,4の動作中に、各ロボット3,4に対して動的に変更される。
(もっと読む)
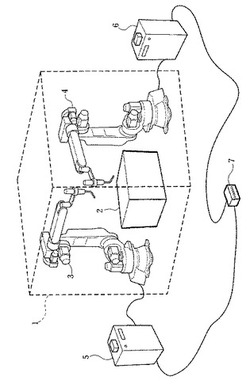
マニピュレータロボット

【課題】第1および第2のアームがより効率的かつ多目的に使える方法で互いに協働可能なマニピュレータロボットを提供する。
【解決手段】支持構造(20)と、支持構造(20)に吊された状態で装着され、各回転軸を中心として相対的に回転可能に連続する複数のボディをそれぞれ有する第1ロボットアーム(30)および第2ロボットアーム(40)と、第1および第2のロボットアーム(30,40)をそれぞれ装着する第1および第2の装着手段とを備える。第1および第2の装着手段により、第1ロボットアーム(30)の第1ボディの回転軸は、第1方向(A1)に沿って配置され、第2ロボットアーム(40)の第1ボディの回転軸は、第2方向(A2)に沿って配置される。
(もっと読む)
関節ロボット手首
【課題】コンパクトで負荷の少ないロボット手首を提供する。
【解決手段】第1の端部および第2の端部を含み、その第1の端部は、第1の軸IVの周りに回転可能なロボット構成要素に配設されることを企図する第1の本体12と、第1の端部および第2の端部を含み、その第1の端部は、第1の本体12の第2の端部に、第1の軸IVに対して傾斜した第2の軸Vの周りに回転可能に配設される第2の本体14と、第1の端部および第2の端部を含み、その第1の端部は、第2の本体14の第2の端部に、第2の軸Vに対して傾斜した第3の軸VIの周りに回転可能に配設される第3の本体16とを含む関節ロボット手首10において、第1の軸IVおよび第3の軸VIは、共に、第2の軸Vに実質的に直交し、第1の軸および第3の軸は、当該ロボット手首の少なくとも1つの位置において実質的に互いに一致する。
(もっと読む)
関節ロボット手首
【課題】よりコンパクトな構造・より簡素でより信頼性の高い手首機構を提供する。
【解決手段】第1の端部および第2の端部を含む第1の本体12であって、該第1の本体12の第1の端部は、第1の軸IVの周りに回転可能なロボット構成素に配設され、第1の端部および第2の端部を含む第2の本体14であって、該第2の本体14の第1の端部は、第1の本体12の第2の端部に第1の軸IVに対して傾斜した第2の軸Vの周りに回転可能に配設され、第1の端部および第2の端部を含む第3の本体16であって、該第3の本体16の第1の端部は、第2の本体14の第2の端部に第2の軸Vに対して傾斜した第3の軸VIの周りに回転可能に配設されるロボット手首であって、第1の軸IVおよび第3の軸VIは、第2の軸Vに対して実質的に90°の角度を形成し、当該ロボット手首の少なくとも1つの姿勢において、第1の軸および第3の軸は互いに実質的に一致する。
(もっと読む)
関節ロボット手首
【課題】よりコンパクトで簡素な構造の手首機構を提供する。
【解決手段】第1の端部および第2の端部を含み、その第1の端部は、第1の軸IVの周りに回転可能なロボット構成要素に配設されることを企図する第1の本体12と、第1の端部および第2の端部を含み、その第1の端部は、第1の本体12の第2の端部に、第1の軸IVに対して傾斜した第2の軸Vの周りに回転可能に配設される第2の本体14と、第1の端部および第2の端部を含み、その第1の端部は、第2の本体14の第2の端部に、第2の軸Vに対して傾斜した第3の軸VIの周りに回転可能に配設される第3の本体16とを含む関節ロボット手首10において、第1の軸IVおよび第3の軸VIは、共に、第2の軸Vに実質的に直交し、第1の軸および第3の軸は、当該ロボット手首の少なくとも1つの位置において実質的に互いに一致する。
(もっと読む)
ロボットシステム
【課題】操作性に富んだ複数のロボットにたいする教示装置を提供すること。
【解決手段】ポータブル・プログラミング・ターミナル20は、上記制御ユニット14とデータ接続されている。手動ガイド・デバイス30は、ロボット1の可動構造部2およびエンド・エフェクタ13の少なくとも一方に対して、自身を連結する連結手段を備える。手動ガイド・デバイス30は、ポータブル・プログラミング・ターミナル20とのワイヤレス通信チャンネルをセットアップするワイヤレス通信手段を有し、当該ワイヤレス通信手段は、手動ガイド・デバイス30上の第1トランシーバー・モジュールと、ポータブル・プログラミング・ターミナル20上の第2トランシーバー・モジュールと、を備える。
(もっと読む)
関節のあるロボットの手首
【課題】ロボットの手首それ自身に組み付けられる装置への電気及び/又は流体の供給用のケーブル類を手首構造の内部で利用でき、かつ機構の構成要素の数を劇的に減少させた手首機構を提供すること。
【解決手段】関節のあるロボットの手首20は、第1軸IVの回りで回転可能なロボットの構成要素に組み付けられる第1支持体22と、第1軸IVに対して傾斜している第2軸Vの回りで回転可能な様式で第1支持体に組み付けられる第2支持体24と、シャフトが、第1ギヤ変速機を介して第2支持体と回転して接続され、第1支持体22によって支持される第1モータ28と、第2軸Vに対して傾斜している第3軸VIの回りで回転可能な様式で第2支持体24に組み付けられる第3支持体26と、シャフトが第2ギヤ変速機を介して第3支持体26と回転して接続され、第2支持体24によって支持される第2モータ30と、を備える。
(もっと読む)
工業用ロボットの制御方法、ロボット、システム、及びコンピュータプログラム
【課題】工業用ロボットを制御するプロセス、並びに、これに関連するロボット、システム、及びコンピュータプログラムを提供する。
【解決手段】ロボットシステムX〜Zは、複数のマニピュレータ1x〜2x、1y〜2y、1w〜2w、1z〜2zとポータブル端末3とを有し、この端末f、ワイヤレスモードでマニピュレータに接続することができる。システムは、プログラミングモード(主要)で端末3を第1のマニピュレータ1x〜2xに接続し、同じセッション中に、監視モード(二次)で第2のマニピュレータ1w、2wに接続可能である。
(もっと読む)
工業用ロボットの制御方法、ロボット、システム、及びコンピュータプログラム
【課題】工業用ロボットを制御するプロセス、並びに、これに関連するロボット、システム、及びコンピュータプログラムを提供する。
【解決手段】工業用ロボットが、制御ユニット(2)とポータブル端末(3)とを備えたマニピュレータ(1)を有し、ユニット及び端末は、ワイヤレスモードでロボットプログラミングセッションを実行するよう通信することができる。ユニット(2)及び端末(3)は、端末(3)がユニット(2)の近くの実質的に予め定義された物理的な位置(5)にある場合にのみ、プログラミングセッションを可能にすることが必要な相互論理結合のステップを実施するよう構成される。
(もっと読む)
荷物昇降装置
【課題】装置の上昇動作を与えるために、アクチュエータによって与えられた力を高効率に活用することができる昇降装置を提供する。
【解決手段】 荷物昇降装置は、下側構造体2と、上側構造体3と、前記両構造体をX型に接続するリンク機構4と、接続部材22の位置を制御するアクチュエータ装置19と、固定カム28と協動するカムフォロワ部材26とを有し、接続部材22は、アクチュエータ19をリンク機構の1つのアーム5に固定する。アクチュエータ19が動作して装置の上昇動作を起こさせたとき、接続部材22が、実質的に、カム28と可動接続したアーム5との間の圧縮に耐える押圧支柱として作用するように、アクチュエータ19は、リンク機構のアーム5に対する接続部材22の関節軸23の下に位置する軸21周りに接続部材22に対して可動接続されている。
(もっと読む)
1 - 10 / 10
[ Back to top ]