
Fターム[2D003DC05]の内容
Fターム[2D003DC05]に分類される特許
1 - 2 / 2
作業機械の操作装置
【課題】
複数の操作レバーを備えた作業機械において、操作性を損なうことなく、操作者の意図しない操作レバーの誤操作を防止する。
【解決手段】
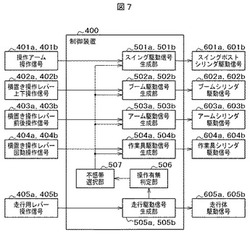
作業機械には、1対の走行体と、少なくとも1個の作業フロントと、操作者が搭乗するキャブが備えられており、キャブ内には操作装置50a、50bが配置されている。操作装置は、作業フロントと下部走行体とで構成されるアクチュエータ群の中のいずれかのアクチュエータを操作する第1の操作レバー300a、300bと、第1の操作レバーが操作するアクチュエータを除いたアクチュエータ中のいずれかのアクチュエータを操作する第2の操作レバー54a、54bとを有している。第1の操作レバーが操作中であると判断したときに第2の操作レバーの不感帯を第1の操作レバーの不感帯より大きくする制御装置400を設けた。
(もっと読む)
旋回角度検出装置及びそれを備えた旋回式作業機械

【課題】旋回角度検出装置において、近接センサが頻繁に検出と非検出とを切り換えるのを防いで、旋回角度検出装置の信頼性を向上させる。
【解決手段】下部走行体(固定体)に回転軸を中心に回転自在に支持された上部旋回体10(回転体)の下部走行体に対する旋回角度を検出する旋回速度検出装置20として、上部旋回体10に近接センサ21を設け、下部走行体に近接センサ21に検出される被検出板22を設ける。被検出板22における近接センサ21に検出される部分の、上部旋回体10の回転軸を中心とする周方向端部を上部旋回体10の半径方向に延びる直線に対して傾斜させる。
(もっと読む)
1 - 2 / 2
[ Back to top ]