
Fターム[5F031CA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理の対象物 (12,583) | 円形基板 (7,645) | ウエハ (7,427)
Fターム[5F031CA02]に分類される特許
1 - 20 / 7,427
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
ワーク貼着方法およびワーク貼着装置
接合方法、プログラム、コンピュータ記憶媒体、接合装置及び接合システム
薄板収納容器
基板温調固定装置及びその製造方法
ウェーハ保護クッション材
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
露光装置および露光方法
接合方法、プログラム、コンピュータ記憶媒体、接合装置及び接合システム
ウエハ処理装置
薄板収納容器
検出方法
ワーク検出機構
露光装置
基板収納容器
ピッチ変換構造
搬送装置及び基板処理システム
基板処理装置および基板処理方法
基板収納容器
駆動システム及び駆動方法、並びに基板貼り合わせ装置及び基板貼り合わせ方法
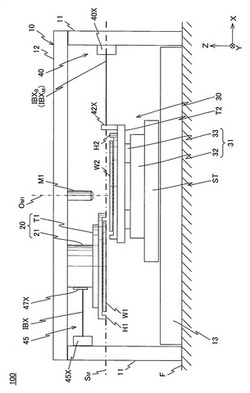
【課題】2つのウエハを高精度で位置合わせする。
【解決手段】 基板貼り合わせ装置100において、第1及び第2テーブルT1,T2がそれぞれ保持するウエハW1,W2を張り合わせるために第1及び第2テーブルT1,T2を互いに接触した際に、X干渉計40X(第1計測器)が設置された第2テーブルT2(ステージ装置30)が示す共振モードに対して逆相の共振モードを示す第1テーブルT1(第1テーブル装置20)にX干渉計45X(第2計測器)が設置されている。これらの計測器を用いて1入力2出力系(SIMO系)のフィードバック制御系を構築することにより、第1及び第2テーブルT1,T2間の接触状態に拠らず、制御系を切り換えることなく、高帯域でロバストな第2テーブルT2(ステージ装置30)の駆動を制御する駆動システムを設計することが可能となる。
(もっと読む)
1 - 20 / 7,427
[ Back to top ]