
国際特許分類[B25J13/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176) | 足で操作する制御装置 (2)
国際特許分類[B25J13/04]に分類される特許
1 - 2 / 2
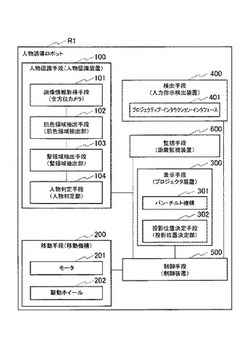
人物誘導ロボット
【課題】人物を的確に認識すると共に、その人物を確実に目的地に誘導することのできる人物誘導ロボットを提供する。
【解決手段】ロボットR1の周囲における静止中または移動中の人物を認識する人物認識手段100と、ロボット自体を移動させる移動手段200と、誘導すべき人物に対して、誘導に必要な情報を移動経路を構成する床面または移動経路周辺の壁面に投影して表示する表示手段300と、該表示手段で表示された表示内容に対する誘導すべき人物による入力指示を検出する検出手段400と、検出手段によって検出された入力指示に基づいて、移動手段および表示手段を制御する制御手段500とを備える。
(もっと読む)
ロボット操作入力装置およびそれを備えたロボット

【課題】操作者の動作に追従するようにロボット脚を操作することのできるロボット操作入力装置を、従来よりも少ない数のセンサにて実現する。
【解決手段】ロボット操作入力装置は、歩行可能な脚2を有するロボット1の当該脚2を操作するための入力装置である。ロボット操作入力装置は、操作者100の足115を支持する足支持部材32と、足支持部材32と一体化されまたは足支持部材32に取り付けられ、操作者100のくるぶしに追従して動く追従部材31と、追従部材31に取り付けられた6軸力覚センサ20と、を備えている。
(もっと読む)
1 - 2 / 2
[ Back to top ]