
株式会社デンソーウェーブにより出願された特許
31 - 40 / 1,155
ロボットシステム
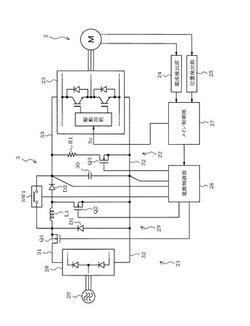
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
合成樹脂製のケーブル・配管類保護案内部材

【課題】本発明は、従来のケーブル・配管類保護案内部材におけるリンクプレートなどの組み立て作業を不要とし、長尺であっても製造可能であるとともに摩耗損傷による発塵、屈曲騒音、屈曲振動を抑制し、ケーブル・配管類の直線姿勢を確実に保持して屈曲移動時におけるケーブル・配管類の飛び出しを阻止すること。
【解決手段】帯状基部110とこの帯状基部110の左右両側縁に沿って一体に連続成形されてケーブル・配管類Cをケーブル長手方向に沿って左右両側から抱持する左抱持部120aと右抱持部120bとで囲繞され、ケーブル・配管類Cのケーブル長手方向に沿って延在する帯状基部110が、ケーブル・配管類Cの直線姿勢を保持した状態で左抱持部120aと右抱持部120bとの間に配置されてケーブル収容空間Rの内側へ膨らんだアーチ状曲面を形成した合成樹脂製のケーブル・配管類保護案内部材100。
(もっと読む)
合成樹脂製のケーブル・配管類保護案内部材
【課題】本発明は、従来のケーブル・配管類保護案内部材におけるリンクプレートなどの組み立て作業を不要とし、長尺であっても製造可能であるとともに摩耗損傷による発塵、屈曲騒音、屈曲振動を抑制し、ケーブル・配管類の直線姿勢を確実に保持すること。
【解決手段】帯状基部110とこの帯状基部110の左右両側縁に沿って一体に連続成形されてケーブル・配管類Cをケーブル長手方向に沿って保持する周壁部120で囲繞され、ケーブル・配管類Cのケーブル長手方向に沿って延在する帯状基部110が、ケーブル収容空間Rの内側へ膨らんだアーチ状曲面を形成し、ケーブル・配管類Cの直線姿勢を保持した状態で周壁部120の左右両側縁の間に配置され、ケーブル・配管類Cを保持した屈曲姿勢に応じて弾性変形して平坦面化する合成樹脂製のケーブル・配管類保護案内部材100。
(もっと読む)
ロボットの電磁ブレーキ制御装置
【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。CPU30は、駆動軸の制動を解除する期間の初期において所定期間にわたって電圧印加のON期間を維持する。
(もっと読む)
アレーアンテナ装置
【課題】装置の大型化を抑制しつつ、軸比を改善することができるアレーアンテナ装置を提供する。
【解決手段】無線信号を受信するための励振素子10と、その励振素子10から所定の間隔だけ離れて設けられた複数の非励振素子11とが、円形の接地導体17の上に設けられ、各非励振素子11にそれぞれ接続された複数の可変リアクタンス素子のリアクタンス値が変化することにより指向性が変化するアレーアンテナ装置において、接地導体17に対して励振素子10および非励振素子11の側に導体円板19を配置する。この導体円板19は、接地導体17と平行であり、その軸心が接地導体17を通り、励振素子10および非励振素子11との間の距離d、導体円板の半径rが所定の条件を満たすようにする。
(もっと読む)
ケーブル保護案内部材の取付構造、及びその取付構造を備える生産機器
【課題】共通の軸線を中心として相対回転する部材にケーブル保護案内部材を取り付ける取付構造において、保護案内部材自体の構成及びその取付構造を簡素化する。
【解決手段】保護案内部材30は、樹脂により長尺状に一体で形成され、長手方向に垂直な断面が中空の矩形状である。保護案内部材30には、所定の1面を残して3面を切り込む長手方向に垂直なスリットが、長手方向に所定間隔で設けられている。保護案内部材30は、所定の1面を軸線R側へ向けるようにして、第1端部30aが第1部材21に取り付けられるとともに、第1端部30aから長手方向に離間した第2端部30cが第2部材22に取り付けられており、第1端部30aから軸線Rの周方向へ捻り折り返し位置31まで延ばされ、捻り折り返し位置31において第2部材22へ向かうように捻られつつ折り返されて、軸線Rの周方向へ第2端部30cまで延ばされている。
(もっと読む)
光学的情報読取装置
【課題】撮像した情報コードを複雑な処理を行うことなく高精度に二値化し得る光学的情報読取装置を提供する。
【解決手段】二値化処理は、対象画像Poに対して低解像度画像Paが生成されその各画素の輝度値がそれぞれ測定されると、スコア算出枠Sを所定画素ずつ移動させてその移動ごとに当該スコア算出枠S内に位置する各画素のうち枠内平均値を基準に明色領域に判定される画素に対して一定のスコア値を加算して、上記低解像度画像を構成する全ての画素にて総スコア値をそれぞれ算出する。そして、近くに位置する高スコア画素および低スコア画素の中間位置での所定の閾値を、両画素の輝度値の平均値に等しくする設定を実施することで、所定の閾値が複数箇所設定されると、上記対象画像Poを構成する各画素が、設定された複数箇所の閾値に基づいて、明色領域および暗色領域のいずれかに区分けされる。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
ロボット
【課題】稼働率の低下や維持コストの増加を招くことなくロボットの波動歯車減速機の良好な動作を長期間にわたって維持する。
【解決手段】ロボットは、ウェーブジェネレータとサーキュラスプラインとフレクスプラインとを含む波動歯車減速機と、波動歯車減速機における中心軸付近にグリスを供給するグリス供給部と、波動歯車減速機の外周付近において供給されたグリスを回収するグリス回収部と、を備える。
(もっと読む)
ケーブル・配管類保護案内部材用取り付けブラケット
【課題】ブラケット構造を簡素化して合成樹脂製ケーブル・配管類保護案内部材を機械フレーム側へ緩みなく密着させる取り付け作業を簡便かつ確実に達成し、合成樹脂製ケーブル・配管類保護案内部材の屈曲動作で発生しがちな機械フレーム側との間の振動騒音を吸収するケーブル・配管類保護案内部材用取り付けブラケットを提供すること。
【解決手段】ケーブル・配管類Cのケーブル長手方向に沿って延在する帯状基部210とケーブル・配管類Cをケーブル長手方向に沿って拘束する多数の左抱持部220aと右抱持部220bとで囲繞されたケーブル収容空間R内にケーブル・配管類Cを収容してU字状に屈曲させながら保護案内する合成樹脂製ケーブル・配管類保護案内部材200の端部に着脱自在に係止する保護案内側係止部110と、ケーブルCを接続する機械側フレーム側に着脱自在に取り付ける機械フレーム側固定部120とを一体に備えたケーブル・配管類保護案内部材用取り付けブラケット100。
(もっと読む)
31 - 40 / 1,155
[ Back to top ]