
株式会社中野により出願された特許
1 - 4 / 4
把持装置
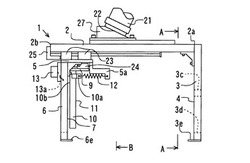
【課題】変形し易く強度が弱い段ボール箱のようなワークの変形を最小、確実に保持し、ワーク寸法に応じて確実にワークを把持することのできる把持装置を提供。
【解決手段】把持装置1は、ロボットのアーム先端22に取り付けられた水平角枠2と、短辺側から垂下し把持平面4を有する固定把持部3と、他方側に移動部5と、移動部から垂下する把持平面7を有する移動把持部6と、移動部に設けられた検出移動部9と、検出移動部を付勢するスプリング12と、検出移動部から垂下する接触平面11を有する検出板10と、検出板の接触平面と把持部の把持平面との差が所定量以下になった時に信号を出力する検出器13と、を設け、さらに、移動及び固定把持部の下部に互いに相手側方向に延出する爪3e,6eを設けた。
(もっと読む)
野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置

【課題】廉価で比較的確実に段ボール箱の変形や破損を検知して次行程に搬送できる野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置を提供。
【解決手段】野菜又は青果が梱包された段ボール箱2と、段ボール箱を搬送する搬入コンベア4と、搬入コンベアから移送された段ボール箱を所定位置に停止させる待機部10と、待機部の段ボール箱を把持するロボット13と、ロボットに把持された段ボールが積み込まれる搬送用台車15とを有するピッキング装置1及び、ピッキング装置に用いる幅検査装置5であって、待機部の前行程に一対の当接板54,56を段ボール箱の両側面4bに当接させ、一対の当接板の距離Hが予め定められた距離以上の場合には、待機部外7,8へ搬出し、未満の場合には、待機部へ搬送する判別機6を設ける。
(もっと読む)
ロボット安全柵用搬入搬出装置及び台車搬入搬出装置
【課題】ロボットが稼働する安全柵内に物品さらには台車を安全確実に搬入搬出するための回転テーブル装置を提供。
【解決手段】作業エリア2を囲む開口部4を有する安全柵3と、開口部に設けられ積載エリアA,Bを有する回転テーブル5と、回転テーブルを分割する仕切壁7と、を設け、所定位置で仕切壁が開口部を閉塞するようにして、安全柵全体を形成した。台車20を載置可能にし、回転テーブル上に台車を固定する第一の固定部40と、仕切壁に台車の上部を固定する第二の固定部90を設ける。第一の固定部は、台車底部24を底部導入部41cから底部受け部41a,41bに導入し、台車の背面側枠61側梁38に係止爪42aで固定する。第二の固定部は、台車左右側枠の支持棒64及び固定棒93により仕切壁に固定する。
(もっと読む)
梱包箱移載・搬出装置
【課題】荷降し時に梱包箱の下面全体が下方の梱包箱の凹凸のある上面に当たっているため、引っ掛かり易い。
【解決手段】梱包箱積重集合体X及び搬出装置2の上方に梱包箱W、Wa…の移載手段1を上下動可能に配設し、該梱包箱移載手段1は、並列配置された複数個の吸着部3、3a…と、該吸着部3、3a…を水平方向に進退自在にして上方に移動可能にする移動部4とを有し、吸着部3、3a…は夫々が独立して後退可能に移動部4に取り付けられ、吸着部3、3a…の前部に吸着体8、8a…を上下・左右方向に揺動可能に取り付けて、梱包箱W、Wa…への吸着後の吸着部3、3a…を移動部4により上動且つ後退させる様にすることによって、梱包箱W、Wa…を、各吸着部3、3a…は装着対象の梱包箱W、Wa…の吸着側面に対し略直角の姿勢を維持させつつ吸着側だけを持ち上げてその反対側のみ接地状態の斜め姿勢で後方に引きずる様に移動させることを可能にする。
(もっと読む)
1 - 4 / 4
[ Back to top ]