
マースランド エヌ・ヴィにより出願された特許
1 - 10 / 12
乳畜のグループを管理するための方法及び装置並びにそのためのコンピュータプログラム
本発明は乳蓄のグループを管理する方法を提供し、動物識別システムを用いて各乳蓄を個別認識し、乳蓄を搾乳して個別の実現乳生産量を生産し、そして乳蓄に個別配給量を給餌し、乳蓄のグループに関するデータを収集する。このデータには少なくとも個別の実現乳生産量及び消費された配給量が含まれる。そして、その後の個別の乳生産量を前記データに基づきモデルを用いて見積もり、一又は複数の乳蓄について、個別配給量と個々の乳蓄の搾乳とのうちの少なくとも一つを、前提条件が適用された調節ステップの中で調整する。本発明はまたそのような方法を実行する装置及びコンピュータプログラムを提供する。 (もっと読む)
ティートカップの洗浄装置および洗浄方法

【課題】柔軟に、速く作業を行えることができるティートカップの洗浄及び/消毒作用を有する装置を提供する。
【解決手段】バルブ(4)で開閉可能な排出口(3)を有する1つ以上のティートカップに接続することができる加熱室(2)と、前記加熱室(2)に洗浄液(11)を供給する充填装置(20)と、前記加熱室(2)内の内容物を加熱する加熱手段とを備え、前記排出口(3)と貯蔵コンテナとの間に連結ライン(17)とを設ける。前記バルブ(4)で前記加熱室(2)が閉じられた際は、前記加熱室(2)が前記充填装置(20)から供給された前記洗浄液(11)で満たされ、前記洗浄液(11)が、大気圧における前記洗浄液(11)の沸点Tkよりも高い温度Tまで加熱された際には、前記バルブ(4)が開放され、前記加熱室(2)の内部に液体状態の前記洗浄液(11)が残存するようにした。
(もっと読む)
動物に飼料を供給するための無人車両
フレームと、そこに設けられた推進手段と、飼料を供給するための飼料供給手段と、監視領域の画像を形成するためのセンサを備え、前記推進手段と結合したナビゲーション手段と、を備えた動物に餌を供給するための無人車両であって、前記センサ(24、28)が、変調された電磁放射線(36、40)を放射するための放射線源(34)と、受信機(50−1、50−2、50−3)の行と列で構成されたマトリックスを備え、対象物(44)によって反射された放射線を受信する装置と、光学素子(48)と、受信機(50−1、50−2、50−3)から対象物(44)までの距離を計算するために、放射された電磁放射線(40)と反射された電磁放射線(46)との間の位相差を求めるために設けられたセンサ画像処理手段とを有していることを特徴とする。これらの装置によって、卓越した信頼性のあるナビゲーションが可能となり、例えば、牛乳を効率的に搾乳装置から子牛のところまで搬送することができる。 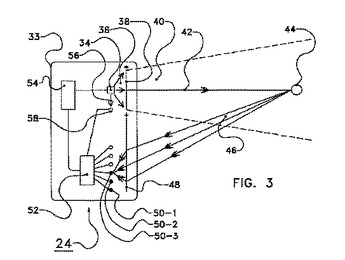 (もっと読む)
(もっと読む)
牛その他の動物に給餌するための給餌ワゴン
牛その他の動物に給餌するための給餌ワゴンは、自律走行車(1)と、飼料を貯蔵するための容器(20)とを備えている。前記容器には、前記容器を充填および空にするための少なくとも1つの開口と、前記自律走行車と前記容器との接続部とが設けられている。前記容器は、略筒状とされてその軸方向軸(22)周りに回転可能とされている。前記容器には、飼料を受け取りおよび/または混合するための作業位置と、前記飼料を排出するための排出位置と、が設けられている。前記自律走行車と前記容器との間の前記接続部には、チルト軸が設けられている。前記筒状の容器は、前記作業位置と前記排出位置との間において、前記自律走行車に対して前記チルト軸周りに傾転可能に設けられている。また、前記発明は、このような給餌ワゴンを備えた、牛その他の動物に給餌するためのシステムを提供するものである。  (もっと読む)
(もっと読む)
ティートカップの洗浄装置および洗浄方法

【課題】本発明の目的は、より信頼できる洗浄および/または消毒作用を有する装置を提供することにある。
【解決手段】前記課題を解決するために、バルブ(4)で開閉可能なディスチャージ(3)を有していて、そして、1つ以上のティートカップに接続することができる加熱室(2)と、前記加熱室(2)に洗浄液(11)を供給する充填装置(20)と、前記加熱室(2)内の内容物を加熱する加熱手段と、を具備したティートカップの洗浄装置において、
(イ)前記加熱室(2)が前記バルブ(4)により閉じられた際には、前記加熱室(2)が前記充填装置(20)から供給された前記洗浄液(11)で満たされ、そして、
(ロ)前記洗浄液(11)が大気圧における前記洗浄液の沸点(Tk)より高い温度(T)まで加熱された際には、前記バルブ(4)が開放され、それにより、前記加熱室(2)の内部に液体状態の前記洗浄液(11)が残存することを特徴とするティートカップの洗浄装置が提供される。
(もっと読む)
家畜の自動搾乳装置
本発明に係るウシのような家畜の自動搾乳装置は、搾乳室(1)と、乳首(46)を観察するセンサ(100)と、前記乳首(46)にティートカップ(28)を自動的に取り付ける搾乳ロボット(3)と、を含む。前記搾乳ロボット(3)は、前記センサ(100)に動作可能に接続されたロボット制御部(120)を有する。このセンサ(100)には、光を発する放射線源(108)と、前記家畜から反射された電磁放射線を受光する受信機(110)と、レンズ(106)と、センサ制御手段と、が設けられている。このセンサ(100)は、複数の行および複数の列をなす前記受信機(110)からなるマトリックスを有する。センサ制御手段によって、前記各受信機(110)に対し前記発光された電磁放射線と反射された電磁放射線間の位相差が決定され、それにより、前記センサ(100)から前記家畜における観察された部分上に存在する複数の点までの距離が計算される。 (もっと読む)
搾乳装置
本発明の搾乳装置は、移動可能なティートカップ(28)付きのティートカップホルダ(26)を1つ以上有するフレーム(10)と、前記ティートカップに接続される引張手段(60)と、で構成される。前記フレーム(10)には、前記フレームおよび前記ティートカップホルダに接続される中間アーム(30)と、前記ティートカップホルダ(26)および前記フレームに、または、必要に応じて前記中間アームおよび前記フレームに接続されるティートカップホルダ位置決め手段(66)と、が設けられ、前記中間アーム(30)には、第1接続部と、第2接続部と、が設けられる。そして、前記ティートカップホルダ(26)および前記中間アーム(30)が、それぞれ、前記引張手段(60)によって、前記第1接続部および前記第2接続部において傾けられる。したがって、ほこりからティートカップ(28)を防ぎ、それらティートカップをコンパクトに格納することができる搾乳装置が提供される。  (もっと読む)
(もっと読む)
飼料移動用無人自律走行車
独立した駆動手段によって独立して駆動可能な二つの車輪(4’、5’)と、車両から壁までの距離を測定する距離測定装置(6)と、壁に対する車両のセンターライン(14)の方向を測定する方向測定装置(9)と、車輪間のトルク差を調整するトルク差調整装置(10)と、車両を制御して進行方向へ移動させる制御ユニット(11)と、略横方向に飼料を移動する飼料移動手段(12)とからなる無人自律走行車であって、前記制御ユニット(11)が、走行中車両が距離測定装置によって測定された壁までの距離を維持し、この距離は壁までの予備調整された最小距離以上となっているようにプログラミングされ、前記制御ユニット(11)が、走行中、距離は壁までの予備調整された最小距離以上となっているようにプログラミングされ、前記制御ユニット(11)が、走行中、車両のセンターライン(14)が前記方向測定装置(9)が測定した、少なくとも予備調整した方向とほとんど等しい、壁に対する方向を維持するようにプログラミングされ、前記制御ユニット(11)が、走行中、駆動可能な前記車輪(4’、5’)が前記トルク差調整装置(10)の測定したトルク差を示し、トルクは予備調整された最大トルク以下となっているようにプログラミングされていることを特徴とする無人自律走行車。  (もっと読む)
(もっと読む)
動物の収容設備の床を清掃する装置及び方法
本発明は、動物の収容設備の床を清掃する装置(1)に関する。装置は、空気流生成装置(8)と、装置の操作を制御する制御装置(6)とを備えている。装置は、制御システムの制御で、床上で移動可能で床の清掃を行なう。制御装置は、最初に空気流生成装置を作動し、次に空気流生成装置を停止するようにプログラムされて床の清掃を制御する。動物の収容設備の床を清掃する方法は、第1清掃工程として、空気流を生成し、空気流を床に向けて、床上の剥がれた物質を除去する。動物の収容設備の床を清掃する装置は、空気流生成装置と、装置の操作を制御する制御装置とを備えている。装置は、制御システムで制御され、床上で移動可能で床の清掃を行なう。装置は、主装置(2)と、主装置(2)に対し移動可能な移動装置(3)とを備えている。床清掃装置(7)及び空気流生成装置は、装置の残りの部分に対し移動可能な移動装置に設けている。  (もっと読む)
(もっと読む)
小区画構造および該小区画構造用の連結機構
動物滞在スペースのパーティションを形成するための小区画構造は、動物滞在スペースの長手方向に延在するパーティション部材と、パーティション部材を支柱に締付け固定するための連結機構とを備えている。連結機構には、連結機構を支柱に固定するための支持部と、パーティション部材を連結機構に固定するためのパーティション部材接続部とが設けられている。パーティション部材は、回転軸周りに回転することにより高さ方向に動かすことができるように構成されている。連結機構には、パーティション部材接続部を回転軸に対して垂直に移動させることによって、パーティション部材接続部を支持部から取り外し可能とするための、クロージング部が設けられている。  (もっと読む)
(もっと読む)
1 - 10 / 12
[ Back to top ]