
Fターム[2B063CB05]の内容
移植機(田植機の接地部) (1,596) | センサー (56) | ピッチングセンサー (4)
Fターム[2B063CB05]に分類される特許
1 - 4 / 4
苗移植機
【課題】
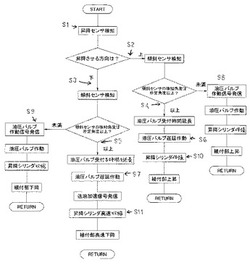
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
乗用田植機

【課題】本発明の課題は、車速の変化に応じて整地ロータ、特に中央のセンタロータを昇降制御することによって、ロータの地中への潜り込みを防止し、整地作業が的確に行えるようにする。
【解決手段】この発明は、苗植付部(4)の前側に植付直前の圃場面を均平化する前位のセンタロータ(27b)と後位のサイドロータ(27a)からなる整地ロータ(27)を設置し、該整地ロータ(27)は、車速の変化に応じて上下動可能に構成すると共に、車速の所定以上の増速に伴い前位のセンタロータが上昇変位すべく関連構成する。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
苗移植機
【課題】圃場における適正な整地作業の実現をはかり、整地装置にかかる負荷を低減し、経済的で、作業効率の良い苗移植機を提供することである。
【解決手段】走行車体10の後ろ側にある苗植付部20は前後にピッチング動可能であり、苗植付部20の前側には整地装置22を取り付けている。更に整地装置22は苗植付部20と共に前後にピッチング動するように苗植付部20と連結して支持されている。
苗植付部20に対して整地装置22を上下動させる上下動装置23を設け、苗植付部20が前方へ傾きながらピッチング動するのに連動させて、整地装置22を上昇させる構成とした。
(もっと読む)
1 - 4 / 4
[ Back to top ]