
Fターム[2B074EB19]の内容
収穫機本体(コンバイン) (7,339) | 制御、警報、安全のパラメーター (251) | その他(始動、終了) (23)
Fターム[2B074EB19]に分類される特許
21 - 23 / 23
収穫作業機制御用のコンバイン制御装置
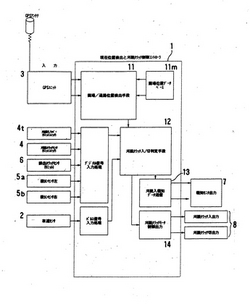
【課題】畦通路から機体を圃場に進入して刈取作業に入る際のオペレータの操作負担を軽減して効率的に収穫作業を開始することができる収穫作業機制御用のコンバイン制御装置を提供することにある。
【解決手段】収穫作業機制御用のコンバイン制御装置1は、走行移動可能なコンバインの機体に搭載されて収穫作業を行う収穫作業機の起動と停止とを制御する制御部12を備えて構成され、上記制御部12は、機体に設けたGPS装置3から測位衛星電波に基づいて得られた機体の位置データを受け、この位置データによる機体位置を圃場の地形図と対照することにより圃場領域に対して所定の距離まで接近したときに接近判定を出力する領域判定手段11を備え、この領域判定手段11の接近判定に応じて収穫作業機を起動制御するように構成する。
(もっと読む)
携帯電話を利用したコンバインの収穫状況表示装置

【課題】。コンバインによる稲等の収穫作業は、刈取から乾燥に至るまでの一連の作業を効率よく行うためには、作業の進行状態を関係作業者が知っておくことが必要であるが、従来の実情においては、圃場で収穫作業を行っているコンバインのオペレーター、一人にしか分からない課題があった。
【解決手段】この発明は、予め、目標収穫量Mを設定して行うコンバインの収穫作業において、制御手段2は、グレンタンク3の穀粒充填量を検出する穀粒センサ4が刈取開始から満タンに達するまでの検出時間の総和を所要時間Tとして求め、該所要時間Tを、指定の携帯電話5に送信する構成とした携帯電話を利用したコンバインの収穫状況表示装置としている。
(もっと読む)
コンバイン
【課題】排出オーガの位置の影響を受けることなく精度良く排出重量を算出するコンバインを提供する。
【解決手段】穀物タンク7の重量を一定間隔t1で計測する重量センサ(計測手段)73と、排出オーガ8を操作するオーガコントローラ(操作部)と、排出オーガ8が一定量(360度)旋回したこと検出するオーガ旋回角センサ(検出手段)93とを備え、排出作業前の穀物タンク7の重量は、オーガコントローラ(操作部)が操作される一定時間t2前に重量センサ73にて計測した第1計測値であり、排出作業後の穀物タンク7の重量は、オーガコントローラ(操作部)が操作された後、オーガ旋回角センサ93によって排出オーガ8が一定量(360度)旋回したことを検出した一定時間t3後に重量センサ73にて計測した第2計測値であり、第1計測値及び第2計測値を用いて穀物の排出重量を算出する。
(もっと読む)
21 - 23 / 23
[ Back to top ]