
Fターム[2B084DH05]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ自動制御における検出手段 (13) | 接触型センサー (7) | 感知具の回動量検知 (2)
Fターム[2B084DH05]に分類される特許
1 - 2 / 2
コンバイン
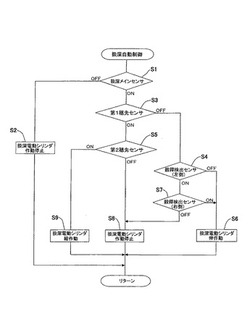
【課題】枕刈りや斜め刈り作業中に扱深搬送装置が深扱ぎ方向に作動制御された状態から通常の刈取り作業状態に移行する時、多量の穀稈が深扱ぎ状態で扱室に供給されて発生する脱穀不良や、脱穀された後の排藁の姿勢変動による排藁搬送装置とカッタ装置で発生する排藁の詰まり等の防止を図る。
【解決手段】刈取り穀稈の稈量を検出する稈量検出手段62a,62bを前処理部2の穀稈搬送経路中に設け、前記稈量検出手段62a,62bが少量の刈取り穀稈を検出した時は、扱深制御手段22による扱深搬送装置21の作動制御を浅扱ぎ方向にのみ実行するように構成した。
(もっと読む)
コンバイン

【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
1 - 2 / 2
[ Back to top ]