
Fターム[2B382LA07]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動のための検出対象又は検出量 (268) | 長さ、距離、間隔又は位置 (167)
Fターム[2B382LA07]の下位に属するFターム
部材の位置 (32)
距離 (72)
制御モード切換、制御開始又は中止の位置 (57)
車体の沈降量、高さ又は位置 (3)
Fターム[2B382LA07]に分類される特許
1 - 3 / 3
コンバイン
【課題】構造の簡素化及び低コスト化を図るようにしながらも、副切断装置の高さ調整を主切断装置とは別個に行える状態と、主切断装置の高さ変更に連動して副切断装置を姿勢変更させる状態とに切り換えることを、確実に行わせる。
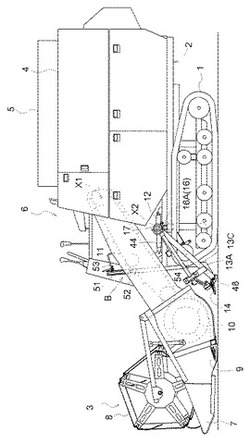
【解決手段】主切断装置9が刈取搬送装置3に支持され、副切断装置14が走行機体2に上下揺動自在に装備させた昇降フレーム13A,13Cに支持され、刈取搬送装置3に対する副切断装置14の昇降作動の連係状態を切換操作自在な連係手段Bが、長孔が形成された案内部材51を副切断装置14側に、且つ、長孔に沿って移動自在に係合案内される被案内体52を刈取搬送装置3側に設けて、被案内体52の長孔に沿う移動を規制する連係用操作状態と被案内体52の長孔に沿う移動を許容する連係解除用操作状態とに切り換え自在な切換操作体53を案内部材51に備えて構成される。
(もっと読む)
刈取収穫機の刈取昇降制御装置

【課題】 刈取部が地面に突っ込むことにより刈取部が損傷することを回避しながら、倒伏している茎稈の刈取作業を行う場合において刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さを検出する非接触式の対地高さ検出手段Aが、刈取部における刈幅方向に位置を異ならせて2個備えられ、目標対地高さが制御状態切換用設定高さよりも高いときには、2個の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部を上昇させ、且つ、目標対地高さが前記制御状態切換用設定高さ以下であるときには、2個の対地高さ検出手段Aの夫々が目標対地高さよりも低い値を検出すると刈取部を上昇させるように昇降操作手段C1を制御するよう構成されている。
(もっと読む)
コンバインの刈高さ検出装置
【課題】 コンバインの刈高さ検出装置における接地体の損耗度合いを簡単に識別できるようにして、接地体の交換時期を判別しやすくする。
【解決手段】
走行機体の前部に設けた刈取り部の下部に、前部支点Xを中心に上下揺動して接地追従する接地体23と、その接地体23の姿勢変化を検出する検出部20とを設け、刈高さ検出姿勢にある前記接地体23の接地作用部分は、機体進行方向に直交する左右方向での断面形状を、断面の左右方向における上下高さが異なる非直線形状に形成してあるコンバインの刈高さ検出装置。
(もっと読む)
1 - 3 / 3
[ Back to top ]