
Fターム[3C007CU09]の内容
マニピュレータ、ロボット (46,145) | 腕 (311) | 腕が交換できるもの (48)
Fターム[3C007CU09]に分類される特許
1 - 20 / 48
サーボ、および、これに用いられるコネクタ
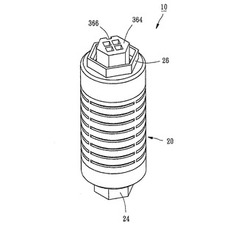
【課題】直列に接続することを可能にし、かつ配線の複雑度および構造を組み立てる際の難度を低減可能なサーボを提供する。
【解決手段】駆動部は、ハウジング20内に装着され、出力軸を有する。メス接続部はハウジング20内に装着され、メス端子364を有し、メス端子364は駆動部の出力軸に接続され、出力軸に駆動され回転可能である。オス接続部はハウジング20内に装着され、オス接続部とメス接続部とは駆動部の向かい合う両側に位置付けられ、かつ電気的に接続される。オス接続部はオス端子を有し、オス端子とメス接続部のメス端子とは互いに対応し、かつ別の一つのサーボのメス接続部のメス端子の接続に用いられる。
(もっと読む)
万能結合構造を持つアクチュエータモジュール{ACTUATORMODULEHAVINGUNIVERSALARCHITECTURE}

【課題】より高い自由度と拡張性、互換性を揃えたロボットソリューションを提供することによって、使用者が自らロボットを変化させ、アップグレード出来る多関節ロボットに利用できるアクチュエータモジュールを提供する。
【解決手段】万能結合構造を持つアクチュエータモジュールに関するものである。アクチュエータモジュール自体に連結部材との結合のための固定片240を設置し、連結部材には固定片に対応する構造を持つ他の固定片を提供することで、通常のボルトとナットの結合手段を利用してより効果的な反復結合構造を形成できる万能結合構造を持つアクチュエータモジュールが開示される。
(もっと読む)
ロボットアーム
【課題】トランスファーチャンバ内の汚染を抑制することができるロボットアームを提供する。
【解決手段】ロボットアーム100は、半導体ウエハを搬送するロボットアームであり、ハンド2と前腕リンク10と上腕リンク14を備えている。ハンド2は、第1関節20を介して前腕リンク10に連結している。上腕リンク14は、第2関節11を介して前腕リンク10に連結している。ロボットアーム100では、前腕リンク10が、第1関節20と第2関節11の間で分割可能に構成されている。
(もっと読む)
ロボット
【課題】ロボットの可搬能力を維持しながらも精度良く外力を制御することができるようにした、ロボットを提供することを目的とする。
【解決手段】複数の関節部を有するアームと、アームを形成し、荷重を支持するアーム構造材と、複数の関節部を駆動させるとともに、アーム構造材に支持されるアクチュエータと、アーム構造材の部材内部に埋設され、当該アーム構造材にかかる荷重を測定する荷重センサと、荷重センサの検出結果に基づいて、アクチュエータの動作を制御するコントローラと、荷重センサからコントローラに接続されるセンサラインをアーム構造材の部材内部からアームの内部空間側に導入する配線孔と、を備えて構成する。
(もっと読む)
減速機構内蔵アクチュエータおよびこれを用いた多関節ロボット
【課題】本発明は、減速機構を組み込んだアクチュエータにおいて軸方向寸法を小さくするとともに、出力軸を中空とする減速機内蔵アクチュエータおよび関節部を小型化したロボットを提供するものである。
【解決手段】フレーム10に固定された環状の固定子鉄心101に電機子コイル102を巻回してなる固定子103と、前記電機子コイル102に通電することで発生する回転磁界または交番磁界の周波数に対して、出力軸速度を減速する減速機構2と、前記減速機構2により減速された出力軸速度をフレーム10に対して回転自在に支持された出力軸5と、回転位置および磁極位置検出手段と、を備え、前記出力軸5の外周に歯数nの歯車を備えるとともに、前記歯車に噛合するように内周に歯数n+aの歯を設けた円板12と、前記円板12の外周にN,S極交互に偶数個の永久磁石11を固着し、前記円板12と空隙を介して対向するように固定子鉄心101が配置されたものである。
(もっと読む)
医療用マニピュレータ、及びその初期化方法
【課題】医療用マニピュレータの駆動部側と作業部側の位置関係の初期化を容易にする。
【解決手段】作業部11が新規装着された場合には、各カウンタ45b〜47bをリセットして、原点位置に対応する「0」とする。1回の手術中で作業部11が再装着された場合には、前回の分離時に復帰メモリ49に保存した各カウンタ45b〜47bのカウント値を読み出して、これをそれぞれセットする。新規装着か再装着かは、作業部11に設けられたシリアル表示部29に表示されるシリアル番号から判断する。
(もっと読む)
医療用マニピュレータ
【課題】手技に影響を与えることなくフィードバック系の異常判断をする。
【解決手段】医療用マニピュレータ10は、モータ40bを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40bの回転軸に接続されるプーリ50bを備える接続部15と、接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54bを介してプーリ50bに連動する先端動作部12と、モータ40bの回転角度Fを検出するエンコーダ44bと、エンコーダ44bの信号を読み込み、動作指令値Cと比較してモータ40bをフィードバック駆動するコントローラ27とを有する。コントローラ27は、先端動作部12が動かない範囲で、エンコーダ44bの分解能以上で、且つモータ40bの動作下限以上に相当する信号をモータ40bに出力して、回転角度Fを監視し、フィードバックループ508の異常判断をする。
(もっと読む)
遠隔作業装置
【課題】広範囲の作業も容易に行える遊泳移動型の遠隔作業装置が持つ作業性と、反力を伴う作業や正確な位置決めが必要となる作業も容易に行える設置型の遠隔作業装置が持つ作業性の下で、設備の予防保全作業を行える遠隔作業装置を提供すること。
【解決手段】本発明では、遠隔制御を受けて、発電プラントその他の設備の予防保全作業を行う遠隔作業装置において、作業具5を保持する先端作業部202とこの先端作業部202の位置決め操作を行う多関節のアーム部203とを有するロボットアーム2と、設備の構造間に架け渡される架橋体を成してロボットアーム2を支持し、この架け渡し方向を軸とする旋回方向、この架け渡し方向に沿う方向、この架け渡し方向の軸から遠ざかる方向およびこの軸に近づく方向の各方向にロボットアーム2を変位させるロボットアーム設置体3と、ロボットアーム2とロボットアーム設置体3とを着脱可能に連結するロボットアーム着脱機構4とを備えるようにした。
(もっと読む)
医療用マニピュレータ
【課題】可撓性部材の寿命を簡便且つ適切に判断する。
【解決手段】医療用マニピュレータ10は、モータ40a〜40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a〜40cの回転軸に接続されるプーリ50a〜50cを備える接続部15と、接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a〜54cを介してプーリ50a〜50cに連動する先端動作部12と、モータ40a〜40cのトルクTを検出する電流センサ118と、コントローラ27とを有する。コントローラ27は、トルクTと駆動力閾値A1、A2とを比較し、トルクTが駆動力閾値A1、A2を超える部分について過トルク積算値Xを求め、過トルク積算値Xが第1積算閾値B1及び第2積算閾値B2を超えたときに所定の対応処理を行う。
(もっと読む)
医療用マニピュレータ
【課題】医療用マニピュレータの動作状態をモニタ画面上で確認可能にする。
【解決手段】医療用マニピュレータ10は、モータ40a、40b、40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a、40b、40cの回転軸に接続されるプーリ50a、50b、50cを備える接続部15と、該接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a、54b、54cを介してプーリ50a、50b、50cに連動する先端動作部12と、アクチュエータブロック30の接続面30aに設けられたLED103と、連結シャフト48内に設けられ、LED103の光を先端動作部12の近傍部まで導く光ファイバ49とを有する。
(もっと読む)
多関節装置
【課題】不可避的な接触又は抗力に対して分離が可能な多関節装置を提供する。
【解決手段】多関節装置Mは複数の関節装置10を備える。関節装置10は、アーム1の一端部とアーム2の他端部とが可動自在に連結する。アーム1及び異なる関節装置10のアーム2が共有の軸心を有する。アーム1の他端面と異なる関節装置10のアーム2の一端面とが結合する。アーム1はN極を有する第1強磁性体4を他端面に備え、アーム2はS極を有する第2強磁性体5を一端面に備える。アーム1と異なる関節装置10のアーム2とは、第1強磁性体4と第2強磁性体5とが磁気結合する。又、アーム1と異なる関節装置10のアーム2とは、共有の軸心を屈折させる強い力が作用すると、第1強磁性体4と第2強磁性体5が分離する磁力で結合している。
(もっと読む)
ロボットハンド
【課題】本発明は、ロボットハンドの小形化を実現するとともに、保守性の向上を図り、産業用ロボットの分野はもとより、デザイン、小形・軽量化が重視される、人型ロボットなどの用途にも適用できるロボットハンドを提供する。
【解決手段】複数個の指用アクチュエータ1により駆動されるロボットハンドにおいて、前記指用アクチュエータ1の出力部(回転部)にリンク部材2を備え、これに隣接する前記指用アクチュエータ1を前記リンク部材2により連結するものである。
(もっと読む)
可動ユニットおよびそれを備えたロボット
【課題】ベース部と可動ユニットとの間、あるいは可動ユニット間での配線が不要で、可動ユニットの動きが制限されず、可動ユニットの交換が容易で、大電力を伝送できる可動ユニットおよびそれを用いたロボットを提供すること。
【解決手段】可動アーム20を駆動する駆動力を利用して、可動アーム20で必要な電力の発電を行うので、可動アーム20への配線を不要にできる。また、配線がないので、可動アーム20の交換を容易にできる。さらに、駆動力を利用して機械的に発電を行うので大電力を伝送できる。したがって、可動アーム20の動きが制限されず、可動アーム20の交換が容易で、ベース部10と可動アーム20間で大電力を伝送できる可動アーム20を得ることができる。
(もっと読む)
ロボットハンドおよび指機構
【課題】物体を変形あるいは毀損することなく把持するのに適したロボットハンドを提案すること。
【解決手段】ロボットハンド1は、リニアアクチュエータ5の作動ロッド5aの前後方向への伸縮動作を、リンク機構を介して左右の第1リンク11の開閉動作に変換している。リンク機構にはコイルバネからなる左右の中間リンク13が含まれている。左右の第1リンク11が把持対象の物体Wに当たると中間リンク13が弾性変形して伸び、物体Wを把持する力が中間リンク13の弾性変形によって徐々に増加する。物体Wに急激に大きな把持力が作用して、物体Wが変形する、毀損するなどの弊害を防止できる。
(もっと読む)
動作治具
【課題】マニピュレータの先端動作部のロック状態を一時的に解除し、先端動作部を動かす。
【解決手段】マニピュレータの作業部16は、アクチュエータ部に着脱自在でモータの回転軸に接続されるプーリ50a〜50cを備える接続部15、及びプーリ50a〜50cに連動する先端動作部12を有する。動作治具400は、接続部15が接続されているときに、プーリ50a〜50cに接続される回転可能なノブ406a〜406cと、接続部15が離れているときにロッキングプレート304を板形状部308a〜308cに係合させ、接続部15が接続されているときにロッキングプレート304を板形状部308a〜308cから離間させるように、ロッキングプレート304を移動させるアライメントピン404a、404b、404cとを有する。
(もっと読む)
マニピュレータ
【課題】アクチュエータ部と作業部を装着した際、迅速に使用準備が完了されるマニピュレータを提供する。
【解決手段】マニピュレータ10は、アクチュエータブロック30と、アクチュエータブロック30に対して着脱自在な作業部16と、作業部16の動作を制御するコントローラ514と、個体識別用の個体信号を保持するバーコード104と、バーコード104に対して非接触で前記個体信号を認識し前記コントローラ514へ供給するカメラ106と、アクチュエータブロック30及び接続部15を係合させる係合部210及び係合片200とを備える。さらに、接続部15には、ロッキングプレート304、コイルスプリング306及びプーリ収納体300を備え、コイルスプリング306により弾性支持されるロッキングプレート304にバーコード104が設けられる。
(もっと読む)
マニピュレータ
【課題】使用時等において、アクチュエータ部と作業部との装着状態を安定して保持することができるマニピュレータを提供する。
【解決手段】マニピュレータ10は、アクチュエータブロック30と、アクチュエータブロック30に対して着脱自在な作業部16と、アクチュエータブロック30に設けられる係合部210と、作業部16に設けられ、アクチュエータブロック30と該作業部16が装着される際には係合部210と係合し、アクチュエータブロック30と作業部16が分離される際には係合部210との係合が解除される係合片200とを有し、前記係合部210又は前記係合片200には、係合するとき及び係合が解除されるときに、アクチュエータブロック30及び作業部16の装着方向と交差する方向に動作可能であり、さらに、前記係合部210及び前記係合片200が係合した状態では、凹部214(凸部216)及び凸部208(凹部209)との係合作用によって係合部210の揺動動作が規制される。
(もっと読む)
双腕ロボット
【課題】ロボットハンドの交換時間を短縮するとともに、専用の動力源を引くことなしに、また、ハンドの誤着を検出することができる双腕ロボットを提供する。
【解決手段】着脱可能なハンド105を備えたロボット100において、先端に多指ハンド104が取り付けられた多自由度の第1のアーム101と、前記着脱可能なハンド105を先端に取り付けた多自由度の第2のアーム102とを備えた双腕ロボット100において、前記多指ハンド104で前記第2のアーム102に取り付けたハンド105を交換する。
(もっと読む)
マニピュレータシステム及びマニピュレータの制御方法
【課題】作業部にセンサ等の電気機器を用いることなく、該作業部を確実に原点復帰させることのできるマニピュレータシステムを提供する。
【解決手段】医療用のマニピュレータシステム500は、先端動作部12の姿勢が変化する作業部16を備えるマニピュレータ10と、該マニピュレータ10を制御するコントローラ514とを有する。コントローラ514は、原点復帰動作として、先端動作部12のグリッパ59を動作範囲の一端である原点位置P0に移動させる際、モータ40に対して、原点位置P0を超える仮想位置を第1制御目標値P1として出力し、その後、原点位置P0を第2制御目標値P2として出力する。第1制御目標値P1は、グリッパ59の制御目標値と実位置との偏差ε相当量よりも大きく原点位置P0を超えた位置である。
(もっと読む)
モジュラー移動ロボット
そこに収容された電源を含むシャーシを有するモジュラー移動ロボット。右および左キャタピラモジュールは、それぞれロボットシャーシに取り外し可能に連結される。各キャタピラモジュールは、側板と、側板に対して回転可能な少なくともひとつの駆動輪と、駆動輪を駆動するためのモーターと、側板に対して回転可能な少なくともひとつのアイドラーと、駆動輪、側板、およびアイドラーの周囲に延在するキャタピラとを含む。独自の砲塔駆動サブシステムを有する砲塔アセンブリは、簡易脱着機構を介してロボットシャーシに取り外し可能に連結される。  (もっと読む)
(もっと読む)
1 - 20 / 48
[ Back to top ]