
Fターム[3C007HS04]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 回転型 (7)
Fターム[3C007HS04]に分類される特許
1 - 7 / 7
マニピュレータ用関節部
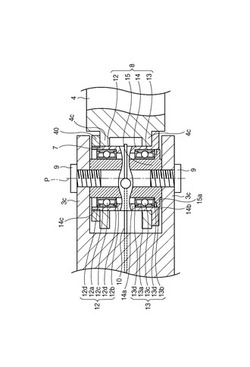
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム及び回動アームの端部同士を連結し、端部を支点として前記回動アームを回動させるマニピュレータ用関節部である。マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔に嵌合する円筒状のハウジングと、該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受と、を有する軸受ユニットと、を備える。ハウジングには、軸方向一方側の外周面に外径側に突出する鍔部が形成され、軸方向他方側の外周面に雄ネジ部が形成され、雄ネジ部にナットを螺合させることにより、回動アームが鍔部とナットに挟まれて軸受ユニットに固定される。
(もっと読む)
駆動装置及びロボット装置

【課題】単純な構成とすることができ、小型化が可能であり、低コスト化を実現可能な駆動装置及びロボット装置を提供すること。
【解決手段】所定の駆動方向に駆動される可動子と、互いに反対方向に分極された一対の圧電層が一体化された圧電層対を有し、前記可動子への近接方向に振動すると共に前記可動子の駆動方向に振動するように形成された電気機械変換素子と、前記電気機械変換素子に対して、前記近接方向の振動と前記駆動方向の振動とを選択的に行わせる制御部とを備える。
(もっと読む)
パラレルリンク型作業装置
【課題】パラレルリンク型作業装置において、可動部に動力を伝達する動力伝達部のリンク等がベースの領域からはみ出ないようにする。
【解決手段】ベース4に扁平な回転型アクチュエータ6を3つ設ける。アクチュエータ6は、その回転出力軸がベース4に対して平行で、ベース4の中央に向き、かつベース4の中央から放射状に並ぶように配置、固定されている。各回転型アクチュエータ6の回転出力軸と可動部5とを平行リンク機構21で構成される動力伝達部で連結する。3つの回転型アクチュエータ6を駆動して可動部5の位置を制御する。ベース4に設けられたエンドエフェクタ姿勢制御用のアクチュエータ7で回転動力伝達手段15を介して可動部5に設けたエンドエフェクタ20を回転させる。平行リンク機構21はベース4の内側領域で移動することから、リンク等がベースの領域からはみ出ることはなく、安全が確保できる。
(もっと読む)
基板搬送装置
【課題】基板の予備位置決め機構を搬入ステージ、露光ステージに設置することなく、露光ステージに搬送する前に基板の予備位置決めを行うことができ、ピンの設置位置の調整も簡単な基板搬送装置を提供することを課題とする。
【解決手段】前記搬入ステージ30上の基板Wの端面を押動して予備位置決めを行う予備位置決め機構2と、この予備位置決め機構を支持本体12により支持すると共に、予備位置決めされた基板を吸着して保持し前記露光ステージ40に搬送する搬送機構20とを備え、前記予備位置決め機構は、前記支持本体に支持された駆動手段6と、この駆動手段により駆動して前記基板の端面を押動する押動手段2とを有し、前記駆動手段は、円筒形の磁気軸体7と、この磁気軸体を軸周りに回動させる回動手段8と、この回動手段により回動する磁気軸体の周面に対面させて設けた直線状の第1長尺磁気体9Aおよび第2長尺磁気体9Bと、を有する構成とした。
(もっと読む)
パラレルリンク型作業装置
【課題】周囲の物体との干渉の危険性を低減したパラレルリンク型作業装置。
【解決手段】各動力伝達部は、リンクLK、ジョイントJ3、ロッド10、ジョイントJ4で構成され、ジョイントJ3はリンクLKとロッド10の一端を接続し、ジョイントJ4は、可動部MVとロッド10の他端を接続する。ロッド10は一方側に凸の湾曲部または屈曲部を持ち、その姿勢は、軸線G、H回りの相対回転のみ許容する自由度2の各ジョイントJ3で、凸側が各リンクLKの位置に拘らず、ベース中心側を向いたままに維持される。ロッド姿勢維持手段として、一端がロッド10の湾曲または屈曲個所に接続され、他端がベース上に接続された弾性を有する紐状の部材を利用することもできる。
(もっと読む)
パラレルリンク型作業装置
【課題】パラレルリンク型作業装置において、可動部に動力を伝達する動力伝達部のリンク等がベースの領域からはみ出さないようにする。
【解決手段】ベース4に扁平な回転型アクチュエータ6を6つ設ける。該アクチュエータ6は、その回転出力軸がベースの中心を向き放射状に設けられている。アクチュエータ6の回転出力軸に固定したリンクとロッド10の一端をジョイントで連結し、かつロッド10の他端をジョイントで可動部5と連結する。6つのアクチュエータを駆動して可動部5の位置、姿勢を制御する。ベース4に設けた姿勢制御用のアクチュエータ7よりジョイント、スプライン継手等で構成された回転動力伝達機構15で可動部5に設けたエンドエフェクタ20を回転させる。リンクはベース4の辺と平行な面上で回転するから、リンクがベース4でカバーする領域からはみ出ることはなく、安全が確保できる。
(もっと読む)
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
1 - 7 / 7
[ Back to top ]