
Fターム[2B034DB07]の内容
土作業機(その他) (8,058) | 畦成形機又は畦シート埋設機の構成 (792) | 揚土部 (222) | ロータリ (43)
Fターム[2B034DB07]に分類される特許
1 - 20 / 43
畦付け機
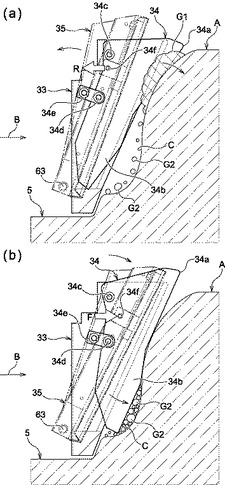
【課題】塊が出来易い土壌の耕作地の畦付けを円滑に良好に行い、畦の固着力を向上させる。
【解決手段】本発明の畦付け機1は、耕作地5の地面5aを掘削し、側部外方Bに耕耘土Gを跳ね上げて盛り土Aを形成する耕耘爪51を備えた耕耘ロータリー31と、耕耘土Gの後方への移動を規制して側部外方Bに導く前面板33と、塊になった耕耘土Gを崩して下方に落下させる崩し板34と、前記盛り土Aの表面を押圧して畦法面7bを成形する揺動板35と、前記成形された畦法面7bの表面を押し固める押固め部材36と、走行車両のドライブシャフト21から動力を得て耕耘ロータリー31と崩し板34と揺動板35と押固め部材36とを駆動する動力伝達機構39と、を備えることによって構成されている。
(もっと読む)
ホルダーガード

【課題】農作業機の回転軸の爪ホルダー部の磨耗を防止できるホルダーガードを提供する。
【解決手段】ホルダーガード51は、回転軸31の爪ホルダー部33に脱着可能に取り付ける取付部52を備える。取付部52には、土付着部50に付着した土をその土付着部50から剥離する土落し部53を設ける。取付部52は、爪ホルダー部33の回転方向前面を覆う前面覆い板部である第1覆い板部分61を有する。取付部52は、爪取付用のボルト36およびナット37によって爪ホルダー部33に爪35とともに取り付けることが可能である。
(もっと読む)
農作業機
【課題】動力伝達軸体が壊れにくい農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する機枠2と、この機枠2に対して可動する可動機枠11とを備える。機枠2は、第1入力軸10を回転可能に支持する第1入力軸支持部7を有する。可動機枠11は、第2入力軸20を回転可能に支持する第2入力軸支持部25を有する。可動機枠11には、前進作業時には前進作業状態となり、後進作業時には後進作業状態となる作業手段13を設ける。動力伝達軸体の軸方向一端部を第1入力軸10に接続し、その軸方向他端部を第2入力軸20に接続する。第2入力軸20は、水平方向に対して所定の傾斜角度θをもって傾斜している。
(もっと読む)
整畦機
【課題】給水部材からの水は繊維材からなる水塗布部材を伝って流下し、水塗布部材を伝って流下してくる水は水塗布部材の遊離下部と圧締板体の表面との接触により塗り付けられるように塗布され、少量の水で回転整畦体の表面を好ましい状態に多湿状態に濡らすことができる。
【解決手段】貯水タンク28及び貯水タンク内の水Qを回転整畦体16に供給する放出口部29bをもつ給水部材29を設け、給水部材に放出口部からの水が伝って流下する繊維材Hからなる水塗布部材35を垂下配設し、水塗布部材の遊離下部35aを圧締板体Eの表面に接触させてなる。
(もっと読む)
畦塗り作業機
【課題】移動時における走行機体と作業機との前後バランスを向上させ、精度の良い畦塗り整形作業を行える畦塗り作業機を提供すること。
【解決手段】走行機体90に装着される装着部5と、装着部5から左右方向に移動可能なオフセット機構部10と、オフセット機構部10の移動端側に設けられた回動支点Oを中心として、水平方向に回動可能に配設された前処理体21及び整畦体40を有する作業部20と、走行機体90から伝達される動力によって前処理体21及び整畦体40を回転駆動させる動力伝達機構部50とを備えてなる畦塗り作業機において、前処理体21は回転軸23と回転軸23に放射状に取付られる耕耘爪24とを備え、回動支点Oは平面視において整畦体40の回転中心軸上に設けられ、平面視において、整畦体40の回転中心軸の方向と前処理体21における耕耘爪24の取付方向との成す角度が鋭角となるように配置されていること。
(もっと読む)
畦塗り機
【課題】新畦内部や畦際表面も締圧して堅牢な畦を形成するとともに、漏水しにくい畦を形成する畦塗り機を提供する。
【解決手段】畦塗り機1は、走行機体90に装着され、この走行位置に対して側方にオフセットした位置に配置され、旧畦Kを切り崩して土盛りを行う前処理部11と盛られた土を旧畦上に塗り付ける整畦部60を備える。前処理部11は、回転自在に支持されて進行方向に沿って延びる耕耘軸12と、耕耘軸12に設けられ耕耘軸12とともに回転する複数の耕耘爪17と、複数の耕耘爪17よりも耕耘軸12の軸心方向後側に延びる耕耘軸12に設けられて耕耘軸12とともに回転し、耕耘爪17によって切り崩された旧畦Kの耕耘跡の表面に盛られた土を、耕耘跡の法面から畦際表面にわたって接触して締め付ける耕耘跡締圧装置30を備える。
(もっと読む)
畦塗り機
【課題】損傷しにくく砕土性能に優れて土寄せ効果が高い前処理部を備えた畦塗り機を提供する。
【解決手段】畦塗り機は、走行機体に装着され、この走行位置に対して側方にオフセットした位置に配置され、旧畦を切り崩して土盛りを行う前処理部61と盛られた土を旧畦上に塗り付ける整畦部を備える。前処理部61は、回転自在に支持された耕耘軸62の軸心方向に所定間隔を有して複数列に設けられた第1耕耘爪67び第2耕耘爪69’を備える。これら耕耘爪は、縦刃部67b、69b及び横刃部67c、69cを有し、縦刃部から横刃部にかけて回転方向と逆向きに弯曲するとともに、横刃部が縦刃部に対して一側方へ弯曲する。最後列の第1耕耘爪67は耕耘軸62の軸心方向前側へ向く横刃部67cを有し、2列目の第2耕耘爪69’は横刃部69cが軸心方向後側に向く。これらの耕耘爪は向き合うように配置され、これらの耕耘爪間に土を保持して搬送可能な土壌保持空間72が形成される。
(もっと読む)
畦塗り機
【課題】損傷しにくく砕土性能に優れて土寄せ効果が大きい前処理部を備えた畦塗り機を提供する。
【解決手段】畦塗り機は、走行機体に装着され、この走行位置に対して側方にオフセットした位置に配置され、旧畦を切り崩して土盛りを行う前処理部61と盛られた土を切り崩された旧畦上に塗り付ける整畦部を備え、走行機体の走行とともに進行して畦塗り作業を行う。前処理部61は、進行方向に沿って延びて回転自在に支持された耕耘軸62と、この軸に設けられた耕耘爪67と、耕耘軸62に設けられ耕耘爪67によって耕耘された土を旧畦側に土盛りする掬い爪69を有する。掬い爪69は、その先端部に土を掬い上げる掬い板部69bを有し、掬い板部69bは耕耘爪67の作用域68の回転後方側に配置され、耕耘爪67の先端部と掬い板部69bの先端部は耕耘軸62の軸方向矢視において接近した位置に配置される。
(もっと読む)
畦付け機
【課題】耕耘ロータリー直後の土溜まりを防止して円滑な畦付けと、良好で固着力の強い畦法面の成形とを可能にする。
【解決手段】畦付け機1は、耕作地5の地面5aを掘削し、側部外方に盛り土を形成する耕耘ロータリー31と、耕耘土の後方への移動を規制する前面板33と、形成した盛り土の表面に作用して畦法面を成形する揺動支点を下方に備えた揺動板35と、成形された畦法面の表面を叩いて押し固める叩き板37と、前記耕耘ロータリー31と揺動板35と叩き板37とを同時に駆動する動力伝達機構と、走行車両の牽引フレーム19に対して回動自在に接続され、前記諸部材を一体に支持する可動フレーム41と、を具備し、前記可動フレーム41に対する前面板33の取付け角度を耕耘作業時において、後傾角度θ分、後方に傾いた後傾姿勢になるように設定している。
(もっと読む)
オフセット作業機
【課題】トラクタにオフセット作業が行えるように装着された作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体の後方にこの走行機体に対して水平回動自在に架設された伝動フレーム9の先端部に水平回動自在に支持された作業部支持・伝動フレーム13に装着され、走行機体の走行位置に対して側方にオフセットした位置で、走行機体の走行にともなって前進作業し、畦に沿ったまま、走行機体に対する、伝動フレーム9の水平回動と作業部支持・伝動フレーム13の水平回動の2通りの動きの自由度を有する作業部51と、
作業部51の位置及び方位を検出するセンサからの情報に基づいて作業部51の前記2通りの水平回動の量を独立して無段階に制御し、走行機体の旋回をともなう前進動時に作業部51を畦に沿わせたまま、その、圃場の隅部付近までの直進性を維持させる制御手段を備える。
(もっと読む)
農作業機
【課題】方向修正制御が容易に行えるトラクタに装着される農作業機を提供することを目的とする。
【解決手段】トラクタに装着する支持フレーム11、12と、支持フレーム11、12に対して回動可能に支持され農作業を行う作業部13と、作業部13を支持フレーム11、12に対して回動させるアクチュエータ22と、制御部26と、方向修正スイッチ27a、27bを有する操作部27と、作業部13に設置されるセンサ31とを備え、制御部26は、センサ31からの情報から作業部13の方向が基準の方向に一定になるようにアクチュエータ22を制御し、方向修正スイッチ27a、27bの操作された場合、アクチュエータ22を駆動させ、当該操作が終了したときの作業部13の方向を新たな基準の方向とする。
(もっと読む)
畦塗り機における前処理体用爪カバー
【課題】土砂を切削する畦切り爪を有する前処理体と整畦体を備える畦塗り機において、前処理体の畦切り爪による切削土砂の飛散範囲を制限し、整畦体の前方に集中させる。
【解決手段】畦塗り機10の前処理体7は、トラクタの後方に接続される支持フレーム13に連結される伝動フレーム14を通じ、トラクタから伝達される動力を受けて軸回りに回転し、整畦体8による畦の整形前に、整畦体8の前方に存在する土砂を切削する畦切り爪2と、畦切り爪2を包囲し、一部に開口を有する爪カバー本体4を備える。爪カバー本体4の開口に面する位置に、畦切り爪2が切削する土砂の飛散の方向を制御する方向制御部材6を接続する。
(もっと読む)
畦塗り作業機
【課題】移動時における走行機体と作業機との前後バランスを向上させ、精度の良い畦塗り整形作業を行える畦塗り作業機を提供すること。
【解決手段】走行機体90に装着される装着部5と、装着部5から左右方向に移動可能なオフセット機構部10と、オフセット機構部10の移動端側に設けられた回動支点Oを中心として、水平方向に回動可能に配設された前処理体21及び整畦体40を有する作業部20と、走行機体90から伝達される動力によって前処理体21及び整畦体40を回転駆動させる動力伝達機構部50とを備えてなる畦塗り作業機において、前処理体21は回転軸23と回転軸23に放射状に取付られる耕耘爪24とを備え、回動支点Oは平面視において整畦体40の回転中心軸上に設けられ、平面視において、整畦体40の回転中心軸の方向と前処理体21における耕耘爪24の取付方向との成す角度が鋭角となるように配置されていること。
(もっと読む)
畝立施肥装置
【課題】 各種作物条件や地域による畝幅の相違等への対応の容易化を図る。
【解決手段】 車体1に耕耘ロータリ6と耕耘土壌を受けて畝成形する畝成形器7を装着し、耕耘ロータリ6の耕耘軸15には畝成形器7で成形する畝の畝幅間で対応する対のディスク25,25を配設し、該ディスク25,25間に粉粒状物を繰り出す繰出装置を設け、対向するディスク25,25間において繰り出された粉粒状物を土壌と共に攪拌する畝立施肥装置において、前記耕耘爪23,23…を着脱自在に装着する爪ホルダ29,29とディスク25,25を着脱自在に装着するディスクホルダ28,28とを一体的に設けた筒状部材26を耕耘爪軸15に対してスライド自在でかつ所定位置に固定可能に設ける。また、耕耘ロータリ6の耕耘フレーム31にツールバー33を設け、該ツールバー33に畝成形器7を左右位置調整自在に設ける。
(もっと読む)
畦塗り機
【課題】土質に対応可能で、適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を盛り上げる回転可能な盛土体3と、盛土体3による盛土を締め固めて畦を形成する回転可能な畦形成体4とを備える。また、この畦塗り機1は、盛土体3が正方向に回転する正転状態と盛土体3が逆方向に正転状態時に比べて速い回転速度で回転する逆転状態とに選択的に切り換え可能となっている。
(もっと読む)
畦塗り機
【課題】畦塗り用の土を各耕耘爪から後方の畦塗り体に向けてスムーズに送り出すことができ、よって、効率良く適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、トラクタTの走行にて畦に沿って移動しながら、ロータリー出力軸91の外周面からこのロータリー出力軸91の軸方向に所定間隔をおいた状態で突出した複数列の耕耘爪96で畦塗り用の土を耕耘して跳ね上げこの跳ね上げられた土を畦塗り体105で旧畦に塗り付ける。複数列の耕耘爪96は、それぞれ先端屈曲側が後方の畦塗り体105を向くように取り付けた。
(もっと読む)
多用途型サトウキビ栽培管理装置並びに栽培管理方法
【課題】1台のトラクターに着脱するだけで、圃場の耕転砕土、種キビの切断・植付け作業、生育各段階ごとの培土といったサトウキビ栽培における異なる各作業内容が可能な多用途型のサトウキビ栽培管理方法と管理装置を実現する。
【解決手段】トラクターに装着状態の耕転用のロータリユニットの後部に着脱可能な植付けユニットと、左右一対の培土鋤とを用意しておき、圃場の耕転時には、植付けユニットや培土鋤は取り外し、植付け時には、植付けユニットを装着すると共に、溝掘り鋤で形成した植付け溝に、搭載されている種キビ切断機でカットされた種キビを連続的に落下させ、覆土された後を鎮圧ローラで加圧し、培土時には、ロータリユニットに左右一対の培土鋤を装着すると共に、左右一対のロータリ爪車を中央で左右に分離し所定の間隔を設ける。
(もっと読む)
畝成形装置と畝成形前処理板
【課題】畝の端部に、畝に交差する別の畝を簡単に形成する畝成形装置と畝成形前処理板を提供する。
【解決手段】走行装置12に取り付けられ走行装置12の回転駆動系で回転駆動される耕耘ロータリ26と、耕耘ロータリ26の後方に配置され畝の谷部と谷部の両側に法面を形成する土押体30と、耕耘ロータリ26の前方に配置される畝成形用前処理板46を備える。畝成形用前処理板46は、走行方向に対して傾斜し、走行方向の前側の端部は走行装置12の後輪16の後方外側に位置し、走行方向の後側の端部は耕耘ロータリ26の前方内側に位置するとともに、土押体30の谷底部30dの進行方向延長線上に達している。畝成形用前処理板46は、走行装置12に係止された支持部材44に取り付けられている。
(もっと読む)
農作業機
【課題】曲がり爪にかかる負荷を小さくでき、適切な農作業ができる農作業機を提供する。
【解決手段】農作業機1は、圃場を耕耘する耕耘爪22と曲がり爪23を設けた耕耘ロータリー20と土の飛散を規制する側板61を備えた耕耘カバー60とを設け、耕耘爪22の回転径よりも小さい回転径の曲がり爪23を前記側板61の近傍に設ける。
(もっと読む)
畦塗り機
【課題】散布ノズルから畦形成手段に向けて散布される液体の散布量を調整できる畦塗り機を提供する。
【解決手段】畦塗り機1は、元畦上に土を盛り上げる盛土手段21と、盛土を締め固めて新畦を形成する畦形成手段22とを備える。畦塗り機1は散布手段31を備え、散布手段31は、ポンプ33、このポンプ33を作動させるアクチュエータおよびポンプ33の作動により畦形成手段22に向けて液体を散布する散布ノズル36を有する。畦塗り機1は、液体の散布量を設定する設定操作手段41と、設定操作手段41の設定に応じて散布手段31のアクチュエータを制御して液体の散布量を調整する制御手段42とを備える。
(もっと読む)
1 - 20 / 43
[ Back to top ]