
Fターム[2B034DB21]の内容
土作業機(その他) (8,058) | 畦成形機又は畦シート埋設機の構成 (792) | 調節装置 (131)
Fターム[2B034DB21]の下位に属するFターム
Fターム[2B034DB21]に分類される特許
1 - 20 / 29
整畦機
【課題】左右一対の後整畦体を退避機構により下方作業位置から上方退避位置に退避させることができ、移動時や保管時等の不使用時における利便性を得ることができる。
【解決手段】機枠体4に走行機体1の進行方向の回転軸線O廻りに一方向Nに回転して泥土を跳上可能な跳上回転体8を設け、跳上回転体の上方位置に泥土を一方側方位置R又は他方側方位置Lの畦Wの上に選択的に放出案内可能な放出位置変向機構9を設け、後方位置に一方側方位置又は他方側方位置の畦を整畦可能な左右一対の前整畦体10aを設け、前整畦体の後方位置に一方側方位置又は他方側方位置の畦を整畦可能な左右一対の後整畦体10bを設け、後整畦体を下方作業位置Vから上方退避位置Zに退避動作させる退避機構10を設けてなる。
(もっと読む)
畦塗り機

【課題】畦塗り機における揺動機構に設けられ、走行機体に対して畦塗り機を揺動させるための伸縮機構について、操作が容易であるとともに、揺動された状態において容易にロックすることができる手動型伸縮機構を提供する。
【解決手段】操作者はロック解除操作部52と一緒に把持部40についても同時に片手持ちするように掴むことで、弾性部材55の弾性力に反発して、ロック解除操作部52が支持軸部54を回動中心として回動されて、ロックピン51が内孔部35から抜かれることとなる。その結果、外筒20と内棒30とが互いに摺動可能となり、手動式伸縮調整機構17が全体的に伸縮することが可能となる。また、手動式伸縮調整機構17が伸縮した後に、操作者が掴んだ手を放すことで、ロックピン51が内孔部35に挿入されて、伸縮状態がロックされることとなる。
(もっと読む)
オフセット作業機
【課題】複雑な操作を必要とせず、簡易的な手動操作により、作業部の前進作業位置と反転作業位置との間における移動を可能とするとともに非作業位置への移動についても可能とし、作業部を移動させる動作に効率良く活かすことができる畦塗り機を提供する。
【解決手段】作業部60を非作業位置から作業位置(前進作業位置及び反転作業位置)に移動させる場合、操作者は片手によりロック状態を解除し、そのままもう片一方の手でグリップ部89を掴み、両手の力を利用して、作業部60を作業位置(前進作業位置及び反転作業位置)に向けて移動させることができる。また、作業部60を作業位置(前進作業位置及び反転作業位置)に移動させた後に、ロック解除操作部52及び把持部90を掴んでいる片手を放すことで、ロックピンが外筒及び内棒に施された孔部に挿入され、手動式伸縮調整機構17が伸びた状態でロックされる。
(もっと読む)
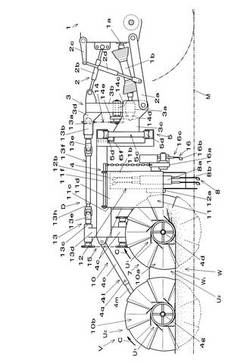
管理作業機の動力伝動装置
【課題】進行方向前方の取付枠体に配設された駆動軸と機枠体側の従動軸との進行方向の距離を長く取ることができ、それだけ、伝動軸の伸縮量を小さくすることができ、機枠体の左右方向の移動による伝動軸の左右方向の振れ動作を円滑に行うことができ、機枠体の左右移動も円滑に行うことができ、自在継手の折曲角度も小さくできて動力伝動を円滑に行うことができ、整畦作業性を向上することができる。
【解決手段】機枠体4の左右移動により左右方向Bに振れ動作する動力伝動機構13の伝動軸13fを、管理作業機構7の上方位置とする干渉回避位置Dに配設してなる。
(もっと読む)
畦塗り機
【課題】整畦体に液体を供給する液体供給装置を設けても、オフセット機構の強度を強化する必要性がない畦塗り機を提供する。
【解決手段】畦塗り機1は、走行機体90の後部に装着されるヒッチフレーム12に畦塗り業を行う作業部40を走行機体幅方向に移動可能に支持する。作業部40は旧畦の一部を切り崩して土盛り作業を行う前処理体49と、前処理体49によって前方に盛られた土を切り崩された旧畦上に塗り付けて新畦を形成する整畦体53とを有して構成される。畦塗り機1には、整畦体53の表面に水を供給する水供給装置60が設けられ、水供給装置60は水を貯留するタンク61を有し、タンク61はオフセットフレーム21の前側上方に配置された状態でヒッチフレーム12に取り付けられる。
(もっと読む)
畦塗り機
【課題】高い畦の天場処理ができ、また非天場処理時に旧畦の天場の上方位置に天場処理部を跳ね上げ可能な畦塗り機を提供する。
【解決手段】畦塗り機は、旧畦の天場を切り崩す天場処理部11と、旧畦を切り崩して土盛りを行う前処理部30と、盛られた土を切り崩された旧畦上に塗り付ける整畦部とを有する作業部を備える。天場処理部11は前処理部30の耕耘軸34と同軸上に回動支点Poを有して上下方向に回動自在な天場動力伝達ケース20の先端部に支持されるとともに、天場処理部11と作業部に設けられたサポートフレームとの間に接続された上下位置調整機構部60によって上下位置調整が可能である。上下位置調整機構部60は長さ調整が可能であり、その他端部は位置変更機構部70によってその揺動支点Pyが位置変更可能である。
(もっと読む)
オフセット作業機
【課題】トラクタに装着して農作業を行う作業部を平行リンクによりオフセット移動する際にコストを抑え、かつ、適切な位置で止めることができるストッパを有するオフセット作業機を提供することを目的とする。
【解決手段】トラクタ200に装着して農作業を行う作業部150を平行リンクによりオフセット移動可能なオフセット作業機において、平行リンクを構成する2つのアーム20、25には、それぞれ他のアーム25、20に向けて突出する突出部21、26を互いの位置をずらして設け、オフセット移動の一方の位置では、突出部21、26同士が当接してストッパとなり、オフセット移動の他方の位置では、少なくとも一方のアーム20(25)の突出部21(26)が他方のアーム25(20)に当接してストッパとなる。
(もっと読む)
畦塗り作業方法
【課題】作業部のオフセット位置の調整を遠隔操作できる畦塗り機を用いて、効率的に畦を形成することができる畦塗り作業方法を提供すること。
【解決手段】走行機体90の走行位置に対するオフセット位置が調整可能な作業部50を備えた畦塗り機1と、作業部50のオフセット位置を調整するためのリモコン装置100とを用いて、旧畦Kに沿って走行機体90を走行させ作業部50によって旧畦Kの盛土を新畦Sに形成する畦塗り作業方法であって、走行機体90の走行にともなって作業部50による畦塗り作業を行いながら、旧畦Kと新畦Sとを直線的に視認可能な位置でリモコン装置100の操作を行って作業部50のオフセット位置を調整すること。
(もっと読む)
農作業機
【課題】可動機枠を手動で容易に移動できる農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する機枠2と、この機枠2に対して移動可能な可動機枠12とを備える。可動機枠12には、畦塗り作業をする作業手段51を設ける。可動機枠12には、作業者が可動機枠12を機枠2に対して手動で移動させる際に把持する把持体131を設ける。把持体131は、第1把持部材133と、この第1把持部材133から側方に向かって突出する第2把持部材134とを有する。
(もっと読む)
畦形成機
【課題】様々な高さの畦の上面を形成するための畦形成機の取り扱いを簡易にする。
【解決手段】畦形成機101は、機枠102と、畦上面削土装置151とを備えて新畦305を形成する装置である。畦上面削土装置151は、機枠102に設けられ畦301の上面304を削る。畦上面削土装置151に備わる第1フレーム153a及び第2フレーム153bは、機枠102に連結され、いずれも機枠102を構成する支軸139を中心に回動自在である。削土ロータは、第2フレーム153bの回動先端側に設けられる。機枠102と第1フレーム153aとは、これらに掛け渡される伸縮自在の調整ロッド158により位置調整がなされる。第1フレーム153aと第2フレーム153bとには、連結ロッド159が架け渡される。連結ロッド159に装着されたスプリングは、第1フレーム153aと第2フレーム153bとを離反させる。
(もっと読む)
オフセット作業機
【課題】トラクタにオフセット作業が行えるように装着された作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体の後方にこの走行機体に対して水平回動自在に架設された伝動フレーム9の先端部に水平回動自在に支持された作業部支持・伝動フレーム13に装着され、走行機体の走行位置に対して側方にオフセットした位置で、走行機体の走行にともなって前進作業し、畦に沿ったまま、走行機体に対する、伝動フレーム9の水平回動と作業部支持・伝動フレーム13の水平回動の2通りの動きの自由度を有する作業部51と、
作業部51の位置及び方位を検出するセンサからの情報に基づいて作業部51の前記2通りの水平回動の量を独立して無段階に制御し、走行機体の旋回をともなう前進動時に作業部51を畦に沿わせたまま、その、圃場の隅部付近までの直進性を維持させる制御手段を備える。
(もっと読む)
畦形成機
【課題】畦上面削土装置の不必要時における畦上面削土装置の適切な収納を実現する。
【解決手段】畦形成機には、旧畦表面に土を盛り上げる盛土装置41、および盛土装置41により盛り上げられた盛土を締め固めて新畦を形成する畦形成装置31、および作業状態では畦上面側に展開され、非作業状態では盛土装置41の上方に折畳まれる畦上面削土装置51とを設ける。折畳み部にはクラッチが設けられ、非作業時には、クラッチを切断して駆動を停止する。
(もっと読む)
畦形成機
【課題】畦形成装置に設けられている円筒部をディスクから簡易かつ迅速に着脱できるようにし、様々な畦高が混在する農地での新畦を形成する作業の効率化を実現する。
【解決手段】畦形成機は、旧畦に土を盛り上げる盛土装置と、盛り上げられた盛土を締め固める畦形成装置と、を備える。畦形成装置は、盛土の斜面を締め固めるディスク33と、盛土の上面を締め固める円筒部とを備える。円筒部は、シャフト341を保持する。シャフト341は、円筒部の軸心方向に平行にそれ自体の長手方向が向き、軸回り方向に回転自在かつ長手方向に移動自在にとなっている。円筒部の端部から突出する嵌合ピン344がディスク33に設けられた第1嵌合孔333に嵌合した状態でカムレバー347を操作すると、シャフト341は長手方向移動及び軸回り回転し、ディスク33と円筒部との着脱がロックされる。
(もっと読む)
農作業機の無線操作システム
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
畦塗り機
【課題】適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機は、トラクタに連結する機体を備える。機体には、土を耕耘して盛り上げる盛土体およびこの盛土体による盛土を締め固めて畦を形成する畦形成体を回転可能に設ける。機体には、下端部が圃場表面部に刺さり込んだ状態で進行方向に移動する方向輪26を上下動可能に設ける。機体には、方向輪26の機体に対する上下動を規制するロック状態および方向輪26の機体に対する上下動を許容するロック解除状態に選択的に切り換え可能なロック手段91を設ける。
(もっと読む)
畦塗り機
【課題】作業性を低下させることなく散布ノズルの土詰まりを解消できる畦塗り機を提供する。
【解決手段】畦塗り機1は、畦形成手段22を有する作業機本体10を備える。畦塗り機1は、畦形成手段22に向けて液体を散布する散布ノズル36を有する散布手段31を備える。畦塗り機1は、散布手段31から散布する液体の散布量を設定する設定操作手段41を備える。畦塗り機1は、散布手段31を制御して液体の散布量を調整する制御手段42を備える。制御手段42は、液体の散布開始の指令を受けたと判断した場合に、散布手段31を制御して、調整可能な範囲内での最大散布量で液体を所定時間散布させた後、設定操作手段41による設定散布量で畦形成手段22に向けて液体を散布させる。
(もっと読む)
オフセット作業機
【課題】農作業を行う作業部をオフセット移動可能で、現在の作業部の状態を確認することのできる表示部を有するトラクタに装着するオフセット作業機を提供することを目的とする。
【解決手段】農作業を行う作業部20をオフセット移動可能でトラクタ1に装着するオフセット作業機2において、表示部51と、センサ41とを有し、表示部51は、センサ41からの情報によりオフセット移動による作業部20の位置を示す現在オフセット位置51aと、あらかじめ設定されている設定オフセット位置51bとを表示することで上記課題を解決する。
(もっと読む)
畦塗り機
【課題】走行車に乗った作業者が走行車に乗ったまま盛土体の畦形成体に対する高さ状態を容易に確認できる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を盛り上げる盛土体3と、この盛土体3による盛土を締め固めて畦を形成する畦形成体4とを備える。盛土体3は、畦形成体4に対して上下動可能となっている。
畦塗り機1は、走行車に乗った作業者から目視可能で、盛土体3の畦形成体4に対する高さ状態を表示する表示手段51を備える。表示手段51は、操作手段26を操作中の作業者からも目視可能である。
(もっと読む)
オフセット作業機及び制御方法
【課題】走行機体の進行に沿ったオフセット位置で圃場隅部までの連続的な前進作業を可能にする。
【解決手段】オフセット位置で作業可能な作業部120と、この方向と位置の基準値を設定する記憶部と、方向及び位置を検出する角度センサ150及び位置センサ151と、方向及び位置を調整する方向シリンダ141及びオフセットシリンダ140と、これらシリンダを制御する制御手段160を備え、制御手段160は、作業部の位置と方向を所定状態に維持して作業する通常作業モード、予め設定された作業部の方向と位置を基準値とし、走行機体の走行方向の変化に伴う作業部の位置と方向の変化を調整して直線状作業を維持する自動直進作業制御モード、このモード終了時の位置を起点とし、隅部に残存する未作業部分を直線状又は円弧状に作業する自動隅部作業制御モードを有し、自動隅部作業制御モードでは段階的に変化する間歇動作による制御をすること。
(もっと読む)
オフセット作業機
【課題】トラクタにオフセット作業が行えるように装着された作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方にこの走行機体2に対し、その幅方向に水平移動自在に架設される伝動部材13に装着され、前記走行機体2の走行にともなって進行し、前記走行機体2の走行位置に対して側方にオフセットした位置での前進作業中に、畦に沿ったまま前記走行機体2に対する水平回動と水平移動の組み合わせからなる2つの動きの自由度を有する作業部51と、前記作業部51の位置及び方位を検出するセンサ20からの情報に基づいて前記作業部51の水平回動と水平移動の前記2つの量を独立して無段階に制御し、前記走行機体2の旋回をともなう前進動時に前記作業部51を畦に沿わせたまま、その、圃場の隅部付近までの直進性を維持させる制御手段を備える。
(もっと読む)
1 - 20 / 29
[ Back to top ]