
Fターム[2B304MD01]の内容
Fターム[2B304MD01]に分類される特許
1 - 11 / 11
田植機
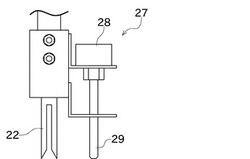
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
トラクタの耕深自動制御装置

【課題】本発明では、トラクタの耕深自動制御装置において、安定した耕深を維持して作業を続けられるようにすることを課題とする。
【解決手段】作業機2をリフトアーム17で昇降可能にトラクタ1に装着し、作業機2を昇降するリフトアーム17に設けるリフトアームセンサ30と端部が接地しながら作業機2の対地作業機構20を覆う作業機カバー23の昇降位置を検出するカバーセンサ29を設け、該カバーセンサ29の検出する対地作業機構20の耕深を設定耕深値となるようにカバーセンサ29の検出耕深値に基づくカバー耕深制御を行い、このカバー耕深制御の間にリフトアームセンサ30が検出する作業機位置検出値を制御基準値として記憶し、以後リフトアームセンサ30が検出する作業機位置検出値が制御基準値となるようにリフトアーム耕深制御で昇降制御してなるトラクタの耕深自動制御装置とする。
(もっと読む)
作業機の傾斜角度検出構造
【課題】機体の傾斜角度が激しく変動する場合にも、機体の傾斜角を応答性良く良好に検出できるようにする。
【解決手段】重力加速度に対する出力が機体の傾斜角度に応じて変化するように機体に装備した加速度センサ77と、加速度センサ77の出力を機体の傾斜角度に換算する換算手段40bを備えて、機体の傾斜角度を検出する傾斜角度検出手段76を構成する。
(もっと読む)
農用作業車
【課題】農用作業車のローリング方向の重心が偏り対地作業装置が圃上面と平行となるべく設定し辛い傾斜地においても、簡便に対地作業装置の姿勢を設定しかつ地表面の凹凸を均平に修正できる農用作業車を提供する。
【解決手段】トラクタ1とトラクタ1にローリング自在に連結されたロータリ耕耘装置14との目標とする相対角度を設定する設定手段と、前記設定手段の設定値を記憶する記憶装置65と、トラクタ1のローリング角の変化速度を検出する角速度センサ19と、トラクタ1の対地角度を検出する傾斜センサ16と、前記目標相対角度を算出する制御装置60と、ロータリ耕耘装置14の姿勢を制御する制御装置60とを具備する農用作業車であって、前記角速度センサ19の検出値が所定の範囲内の場合における目標相対角度を算出する制御装置60は、前記トラクタ1の対地角度の検出値が基準原点値を中心に傾斜方向が異なる場合には各々別個の値を算出する。
(もっと読む)
耕深制御装置
【課題】車輌本体の姿勢に拘わらず、耕耘機の自動耕深制御の安定化を図り得る構造簡単な耕深制御装置を提供する。
【解決手段】リヤカバー624の回動角度に基づき、車輌本体50に対して昇降可能に連結された耕耘機400の検出耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、車輌本体50の検出傾斜角θW又はθLと閾値傾斜角θW’又はθL’との傾斜偏差ΔθW又はΔθLの大きさに基づき自動耕深制御における制御ゲインKpを変更するように構成されている。
(もっと読む)
耕深制御装置
【課題】検出耕深位置と設定耕深位置との偏差の大小に拘わらず、耕耘機の昇降制御の安定化を図り得る耕深制御装置、及び持続的な外乱の入力があった場合であっても、耕耘機の昇降制御の安定化を図り得る構造簡単な耕深制御装置を提供する。
【解決手段】リヤカバー624の回動角度に基づき、車輌本体50に対して昇降可能に連結された耕耘機400の検出耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、検出耕深位置hDと設定耕深位置hRとの偏差Δhの大きさに基づき自動耕深制御における制御ゲインKpを変更するように構成されている。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
農作業機のローリング制御装置
【課題】 検出された機体傾斜角度に基づいて、対地作業装置の左右方向での対地傾斜姿勢が設定傾斜角度に維持されるように、対地作業装置を駆動ローリングさせるローリング制御装置において、通常は検出された機体傾斜角度と設定傾斜角度との偏差に基づいてローリング制御し、畦際等の圃場面の起伏が急でローリングアクチュエータの最大速度で対地作業装置をローリング駆動しても追随が不可能な場合は、ローリングアクチュエータの制御の仕方を替えて作業装置のローリング姿勢の安定化を図る。
【解決手段】 対地作業装置を駆動ローリングさせるローリング制御装置において、現在の走行機体の傾斜変化の状態が、ローリングアクチュエータの最大速度で対地作業装置をローリング駆動しても追随が不可能な状態にある場合は、設定傾斜角度と検出傾斜角度との偏差によらず、機体の傾斜変化の方向とは反対方向に機体が傾動するように制御を行うことを特徴とする。
(もっと読む)
作業機の姿勢制御装置
【課題】耕耘機の左右の耕耘土量が異なる耕耘作業、または傾斜地の耕耘作業などで、傾斜角自動制御、または耕耘深さ自動制御なども容易にできる作業機の姿勢制御装置を提供する。
【解決手段】左右リヤカバー43a,43b間の隙間を各側板70a,70bにて閉塞したから、左右リヤカバー43a,43bの上面側に付着する土量を低減させ、左右リヤカバー43a,43bの重量がこの上面の土量にて変化するのを防ぎ、左右リヤカバー43a,43bのセンサ機能を適正に維持し、ロータリ耕耘機24の左右傾斜角を略一定に維持する傾斜角自動制御、または耕耘爪40の耕耘深さを略一定に維持する後述の耕耘深さ自動制御を実行する。また、前記複数のリヤカバーの少なくとも一つの上下動を検出するリヤカバーセンサの検出結果に基づき、傾斜制御アクチュエータまたは昇降制御アクチュエータを作動させる。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサからの検出信号と角速度センサからの検出信号に基づい姿勢制御用の駆動機構を作動制御して、作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、エンジン始動直後における角速度センサの零点値設定を好適に行うことができるようにする。
【解決手段】
走行機体に搭載されたエンジンの起動時に、角速度センサからの検出信号を所定複数回に亘って取得し、取得した検出信号の全ての値が設定範囲内にあればこれら複数回の検出信号を平均処理して角速度センサの零点値に設定し、取得する複数回の検出信号に前記設定範囲から外れた値のものが含まれていると、予め記憶されている暫定零点値を角速度センサの零点値に設定する零点設定手段を備えてある。
(もっと読む)
1 - 11 / 11
[ Back to top ]