
Fターム[2F103DA01]の内容
Fターム[2F103DA01]の下位に属するFターム
カウンタによる絶対位置管理 (8)
Fターム[2F103DA01]に分類される特許
1 - 20 / 311
サーボモータ
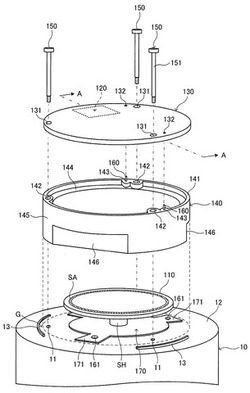
【課題】エンコーダの検査を高精度且つ容易に行うことが可能なサーボモータを提供する。
【解決手段】エンコーダ100は、シャフトSHに連結され、複数の反射スリット111からなるスリットアレイSAが円周方向に沿って形成された円板状のディスク110と、スリットアレイSAに光を照射する点光源121、及び、点光源121から照射されスリットアレイSAで反射された光を受光する受光アレイ122を備えた光学モジュール120と、光学モジュール120が設けられる基板130と、モータMのハウジング10に固定され、ディスク110を内部に収容しつつ、光学モジュール120がスリットアレイSAと対向するように基板130を支持する、円筒状の支持部材140と、を有する。
(もっと読む)
光学式エンコーダおよびこれを備えた装置

【課題】光学式エンコーダにおいて、スケールと受光部とが周期パターンの周期方向に直交する方向に相対変位しても、良好な精度で位置検出を行えるようにする。
【解決手段】エンコーダは、光を反射または透過する光学部が第1の方向に第1の周期で形成された周期パターンを有するスケール2と、該スケールとの第1の方向での相対移動が可能であり、光源1から射出されて光学部を介した検出光を光電変換して第1の周期に応じた変化周期を有する信号を出力する受光部3とを有する。光学部は、第2の方向にて隣り合う複数の部分e〜hが互いに第1の方向にシフトしたパターン形状を、第2の方向に第2の周期tで有する。光源の第2の方向での幅wが、w=(a+b)/b・ntなる条件を満足する。nは自然数であり、光源から周期パターンまでの距離と周期パターンから受光部までの距離との比をa:bとする。
(もっと読む)
エンコーダ用反射型光学式スケール及び反射型光学式エンコーダ
【課題】スケールからの反射光による像のコントラストを高くし光検出器の誤検出を防ぐ。
【解決手段】下地部材に第1領域と第2領域とが交互に配置された反射型光学式スケールであって、下地部材に第1領域と第2領域とが交互に配置され、第1領域は、波長λの光の反射率が第2領域よりも高く、第1領域は、下地部材の上に配された反射部材と、反射部材の上に配された第1材料で構成された層と、第1材料で構成された層の上に配された第2材料で構成された層と、で構成され、第2領域は、下地部材の上に配された第2材料で構成された層で構成され、第1材料および第2材料は、光について透過性を有し、第1材料は、反射部材および第2材料よりも光の屈折率が低く、第2材料は、下地部材よりも光の屈折率が低く、第1材料および第2材料の光学膜厚は、第1領域の方が第2領域よりも光の反射率が大きくなるように設けられている。
(もっと読む)
変位検出装置、変位検出方法及び変位検出プログラム
【課題】安価に光学系の歪みをキャンセルしてスケールの位置情報の検出精度を向上させる。
【解決手段】光電式エンコーダは、発光素子11と、スケール12と、レンズ13と、PDA14と、信号処理演算回路20とを備える。信号処理演算回路20は、歪みテーブル21と、歪み補償回路22と、信号解析回路23とを備える。歪みテーブル21は、例えば予めレンズ13等の光学系の設計値から歪みシミュレーションによって得られた歪み情報Δeiに基づき算出されている。歪み補償回路22は、歪みテーブル21を参照すると共に、PDA14の各PD41の位置情報に基づいて、各PD41の位置xiを仮想的にxi−Δeiの位置に配置変更して光学系の歪みを除去し、PDA14からの明暗信号を補正する。位置解析回路23は、この補正された明暗信号に基づいて、スケール12の位置を解析する。
(もっと読む)
エンコーダ
【課題】リサージュ信号の検出を停止した場合にも、測定精度の低下を抑制可能なエンコーダを提供する。
【解決手段】エンコーダは、スケールと、前記スケールに光を照射すると共に供給される電流に応じて光量を変化させる光源と、前記スケールにより反射された光を受光すると共に位相のずれた2相正弦波状信号を出力する受光部とを備えるエンコーダであって、前記2相正弦波状信号によって形成されるリサージュ波形に含まれる理想的リサージュ波形からの振幅誤差を含む誤差を検出し、検出された誤差を累積演算して新たな補正値とすることで、動的に前記補正値を更新する誤差検出部と、前記振幅誤差に基づく補正値に応じて前記光源に供給する電流を調整する光源駆動処理部とを備える。
(もっと読む)
変位検出装置、目盛の校正方法及び目盛の校正プログラム
【課題】容易且つ安価に構成でき、高精度な目盛の測定誤差の校正を可能とする。
【解決手段】光電式エンコーダ100は、スケール10、検出ユニット20、演算部30を有する。検出ユニット20は、少なくとも3つの検出部21〜23を有する。各検出部は、第1検出部21及び第2検出部22間の測定点の間隔が、物理的に配置可能な最小間隔dとなるように配置され、第2検出部22及び第3検出部23間の測定点の間隔が、最小間隔dよりも大きな間隔となるように配置される。第1検出部21の測定点の出力を1ステップ前の他の検出部の測定点に合わせるように制御しつつ検出ユニット20をステップさせてサンプリングを行う。各検出部の測定点の間隔がすべてd以上となるにもかかわらず、d以下のサンプリング間隔で測定誤差を算出し、自律校正曲線を得てスケールの位置情報を補正することができる。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
検出ユニット、エンコーダ
【課題】モータ軸の回転量を検出するための検出ユニットにおいて、エンコーダとしての信頼性を簡便に高める。
【解決手段】入射光の光量に対応した出力信号を出力する複数の受光素子が所定方向に配置されている受光素子アレイと、符号版の少なくとも一部に光を照射する光源と、を備え、複数の受光素子は、光の光量分布に応じて所定方向と垂直な幅方向における実効領域の幅が変更されてそれぞれ設けられている。
(もっと読む)
回転式位置検出装置
【課題】中心射影方式に基づく回転式位置測定装置について、検査光路上における個々の構成部材間の最適でない間隔についてより影響度を抑え、及び/又は検査すべき被検査物の汚れの影響を極力受けないようにすること。
【解決手段】光源10と、被検査物20を備えたスリット板と、検出装置30とを備える構成とするとともに、スリット板を光源10及び検出装置30に対して回転軸Rを中心として回転可能とし、相対回転時に回転角度に応じた位置信号を検出装置30によって検出可能であり、回転軸R上の光源10を被検査物20から第1の距離uだけ離間させて配置し、検出装置30を、第1の距離uとは異なる第2の距離vだけ被検査物20から離間させて配置した。
(もっと読む)
位置検出器の走査組立品
【課題】位置検出器の走査組立品のキャリアに対する放射線源の所定の位置決めを簡単な手段によって可能にする。
【解決手段】放射線源が、異なる位置でそれぞれの電気導体要素に電気接触していて、この放射線源4をキャリア1に対する調整軌道に沿って異なる位置に配置できるようにするため、キャリア1の電気導体要素と放射線源4の電気接続要素44,46とが、導通部分を形成し、放射線源4をキャリア1に対して固定する前に、この放射線源4が、この放射線源4と電気導体要素との間の電気接触を維持しながら調整軌道に沿ってキャリア1に対して導通部分に接して移動可能である。
(もっと読む)
位置検出方法、及び位置検出装置
【課題】雰囲気温湿度が変化するような場合でも、高精度の位置測定を行うことができる位置測定装置を提供する。
【解決手段】コリメートレンズ2を透過した光のうち、ビームスプリッタ3で反射された光は、集光レンズ8により、CCD9の受光面に集光される。光源1が振動して光ビームの位置が変われば、CCD9に入射する光ビームの位置が変化するので、CCD9の出力変動から、光ビームの振動中心を知ることができる。制御装置10は、この振動中心を検出し、振動中心が予め定められた位置となるように、光源1を加振しているピエゾ素子11に印加する電圧を制御する。
(もっと読む)
干渉計方式により間隔測定するための機構
【課題】十分に平行に配設された二つのプレート間で、高精度で干渉計方式により間隔測定するための機構を提供する。
【解決手段】光源3.1から発せられた光束が、第一プレート1にある分光器要素1.2に傾斜して当たり、そこで反射される参照光束と透過する測定光束に分割される。測定光束は第二プレート2にあるリフレクタ要素2.2に当たり、そこで第一逆反射を受ける。参照光束は第一屈折要素3.2aを、測定光束は第二屈折要素3.2bを通過し、二つの光束は引き続いて、それぞれ関連配置された逆反射器3.3を通過して、測定光束は第三屈折要素3.2cを、参照光束は第四屈折要素3.2dを通過する。そして参照光束は第一プレート1で反射を、測定光束は第二プレート2のリフレクタ要素2.2で第二逆反射を受け、それにより二つの光束が、共直線で検知ユニット3の方向に伝播し、そこで位相がずれた複数の走査検知信号を生成することができる。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ装置、及び装置
【課題】基準位置を高精度に検出する。
【解決手段】エンコーダ装置は、基準位置を示す基準位置パターンと位置情報パターンとを有するスケールと、スケールに光を照射する光源と、光を変調させる変調信号を生成する変調部と、変調信号に基づいて変調された変調光によって位置情報パターンを検出した位置情報信号に基づいて、スケールの位置情報を検出する位置情報検出部と、変調光によって基準位置パターンを検出した検出信号を出力する基準位置受光部と、検出信号に基づいて、基準位置を検出する基準位置検出部と、を備え、基準位置検出部は、光を変調することによって生じる基準位置の変位を補正する補正部を備える。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】大型化し、検出精度等にも不都合が生じる磁気センサの使用をなくし、小型かつ安価なコストで、また5μm以下の分解能で10mm以上の長距離検出を可能にする。
【解決手段】反射面saと非反射面sbを移動物の移動方向に交互に並べた反射板12を設け、反射型フォトセンサ9の受光素子8には、移動物の移動方向でそれぞれ異なる受光領域を持つ複数の受光部8a,8bを設け、この2つの受光部8a,8bから位相差の異なる信号を出力し、これら2つの信号に対し例えばリニア値演算を施すことにより、反射板12及び移動物の位置を検出する。また、3分割受光部から3つの信号の出力することで中点電位をも算出し、この中点電位を基準にしたリニア値演算を行ってもよい。上記受光部では、その受光領域の一部を遮光し、検出出力の直線性を向上させることができる。
(もっと読む)
光学式エンコーダの原点検出方法
【課題】簡単な構成で、光学式エンコーダの原点信号検出を行うこと。
【解決手段】光源1と、配列方向に相対移動が可能なインクリメンタル信号生成用パターン5を有するメインスケール4と、光源1で照明されたメインスケール4を透過、または、反射した光束を受光し、インデックススケールを兼ねる複数のフォトダイオードから成る第1のフォトダイオードアレイと、複数の第1のフォトダイオードアレイから構成される第2のフォトダイオードアレイを有するインクリメンタル信号検出部2と、第2のフォトダイオードアレイからの出力信号を処理するインクリメンタル信号処理部3を有し、メインスケール4が、複数のインクリメンタル信号生成用パターン5と同一ピッチの原点信号生成用パターン9を有し、複数の第1のフォトダイオードアレイから構成される原点信号検出部10からの出力信号を処理する原点信号処理部11を有する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
エンコーダ
【課題】歯車機構を備えた位置検出装置と光学式エンコーダ装置とを備えたエンコーダを提供する。
【解決手段】ハウジング3が第1の収納部11と第2の収納部13との間に軸受けホルダ9を備えている。軸受けホルダ9は、歯車機構21と光学式エンコーダ装置7とを隔離する隔壁部を構成する。歯車機構21と光学式エンコーダ装置7とを隔離すると、歯車機構21から発生する磨耗粉やグリスが飛散して、光学式エンコーダ装置7の構成部品に付着することを確実に防止することができる。
(もっと読む)
光学式エンコーダ
【課題】光源とスケールと受光素子の配置の自由度が高い光学式エンコーダを提供する。
【解決手段】光学式エンコーダ100は、空間的に光学的特性が周期的に変化するスケールスリット122を有するスケール110と、スケール110に向けて光を発光する複数の発光部142を有する発光ユニット140と、発光部142から発光されスケールスリット122を経由した光を受光する受光部172を有する受光ユニット170を有している。発光ユニット140と受光ユニット170は共に基板192に搭載されてヘッド190を構成している。スケール110とヘッド190(受光部172)は、スケールスリット122の光学的特性の変化方向に沿って相対的に移動可能である。スケール110は、発光部142に対向した光入射部118と、受光部172に対向した光出射部120と、光入射部118から入射した光を光出射部120へ導光する導光部を有している。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
1 - 20 / 311
[ Back to top ]