
Fターム[3C007CU04]の内容
マニピュレータ、ロボット (46,145) | 腕 (311) | 腕が直列配列の平行リンク型 (42)
Fターム[3C007CU04]に分類される特許
41 - 42 / 42
トランスファロボット
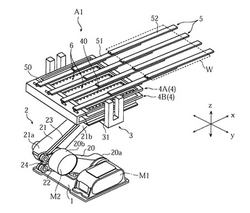
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
移載機

【課題】リンク機構のみで、大きなストロークを確保して大型のガラス板でも、ストッカーなどと干渉することなく、高速で移載できるようにした移載機を提供すること。
【解決手段】先端に搬器4を取り付けた2本一対の搬器支持リンク2と、先端側に搬器支持リンク2を枢着したX字形の主リンク1と、主リンク1の基端側と枢着し、基端側の駆動軸Pにて揺動可能とした2本一対の揺動リンク3とよりなり、揺動リンク3の揺動にて前記リンク機構の屈伸作用で、姿勢を制御しつつ、直線の移載方向の運行軌跡に沿って搬器4を移動するように構成する。
(もっと読む)
41 - 42 / 42
[ Back to top ]