
Fターム[5F031GA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フォーク (2,669)
Fターム[5F031GA02]の下位に属するFターム
複数のフォークを備えたもの (468)
ウエハ等を保持する部分の形状 (199)
フォーク上でのウエハ等の固定機構 (801)
Fターム[5F031GA02]に分類される特許
1,201 - 1,201 / 1,201
ワーク搬送用ロボット
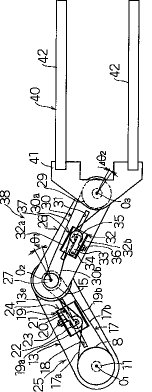
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
1,201 - 1,201 / 1,201
[ Back to top ]