
Fターム[5F031GA07]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フォーク (2,669) | フォーク上でのウエハ等の固定機構 (801)
Fターム[5F031GA07]の下位に属するFターム
Fターム[5F031GA07]に分類される特許
1 - 20 / 60
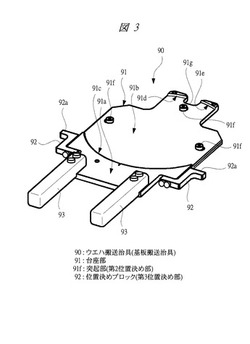
基板搬送治具
【課題】基板を保持した基板ホルダを搬送装置内に高精度に収納する。
【解決手段】複数枚のウエハを収納可能なポッド(フープ)にウエハホルダによって保持されたウエハを収納する際に用いられる治具であり、台座部91と位置決めブロック92とグリップ部93とを有しており、台座部91に一段下がったザグリ面91bが形成され、ザグリ面91bにウエハホルダの回転方向を位置決めする3つの突起部91fが設けられ、位置決めブロック92の突出部92aとポッドとで位置決めを行ってポッドに前記ウエハホルダを収納する。
(もっと読む)
接合システム、基板処理システム、接合方法、プログラム及びコンピュータ記憶媒体

【課題】被処理基板と支持基板の接合を効率よく行い、接合処理のスループットを向上させる。
【解決手段】接合システム1は、接合処理ステーション3に対して、被処理ウェハW、支持ウェハS又は重合ウェハTを搬入出する搬入出ステーション2と、被処理ウェハWと支持ウェハSに所定の処理を行う接合処理ステーション3とを有している。接合処理ステーション3は、被処理ウェハWに接着剤を塗布する塗布装置40と、被処理ウェハWを所定の温度に加熱する熱処理装置41〜46と、支持ウェハSの表裏面を反転させ、接着剤を介して被処理ウェハWと支持ウェハSを接合する接合装置30〜33と、各装置に対して被処理ウェハW、支持ウェハS又は重合ウェハTを搬送するためのウェハ搬送領域60とを有する。
(もっと読む)
基板処理装置および基板処理装置の清掃装置
【課題】 回転機構を持たない基板処理装置であっても、基板と接触する部位を清掃することができる基板処理装置の清掃装置を提供する。
【解決手段】 清掃装置2は、処理されるウエハWと同じ外形のベース400と、ベース400の下面の周縁部に下向きに植設された清掃具であるブラシ402と、ブラシ402を動かす駆動源の振動発生装置404とからなり、ハンド11上で清掃装置2の振動発生装置404が振動してブラシ402が振動し、ハンド11のウエハ支持部材81の支持面86aを清掃する。
(もっと読む)
基板保持装置
【課題】部品点数が少なく簡素な構造であるにもかかわらず、基板に反りや歪みがあっても、安定して真空吸着して保持するができる基板保持装置を提供すること。
【解決手段】吸引通路31を有する搬送アーム本体30と、基板を真空吸着して保持する吸着面41と吸引口42を有する吸着部44と、吸引口と連通する吸引孔45が形成される円筒状の取付部43と、を具備するパッド本体40と、パッド本体の取付部が遊挿可能な挿入孔51と、吸引孔と吸引通路に連通する連通路54が形成され、搬送アーム本体30に対して固定されるパッド保持部材50と、パッド本体の取付部に形成される円弧状の外周溝46と、パッド保持部材の挿入孔に形成される円弧状の内周溝55との間に介在され、弾性変形可能な円形断面のOリング60と、を具備する。
(もっと読む)
エンドエフェクタ及び基板搬送装置
【課題】基板の安定な保持及び確実な搬送が可能なエンドエフェクタ及び基板搬送装置を提供すること
【解決手段】本発明のエンドエフェクタ4は、エンドフェクタ本体5と、電気粘性素子6とを具備する。エンドエフェクタ本体5は、円形基板が載置される載置面を有する。電気粘性素子6は、互いに同一の半径を有する円弧形状に形成された複数の電気粘性素子6であって、載置面上に規定される単一の円上に配置される。
電気粘性素子6は、反りが生じた基板であっても、全体が円形基板に当接する。これにより電気粘性素子6に電圧を印加すると、電気粘性素子6が円形基板に密着し、円形基板を安定して保持することが可能となる。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
ワーク移載装置
【課題】 基板のロードとアンロードを上面に触れずに行う。
【解決手段】 真空吸着ステージ2の真空吸着チャック部3を、真空引きと空気供給を切換可能とする。真空吸着ステージ2上の基板載置領域に基板1の搬入と搬出を行わせるためのロボットハンド11に、真空引きと空気供給を切換可能な真空吸着チャック部12を設ける。真空吸着ステージ2の上方位置に、楔状の爪部7bを下端に有する係止爪部材7を基板載置領域13に近接、離反する方向と昇降方向に動作可能に備えてなるワーク昇降手段6を設ける。真空吸着ステージ2より基板1のアンロードを行う場合は、空気供給する真空吸着チャック部3上で空気浮上させた基板1の外周縁部の下面側に、ワーク昇降手段6の係止爪部材7を係止させてから上昇させることで基板1の外周縁部を持ち上げ、この状態で基板1の下側に挿入させるロボットハンド11により、基板1を搬出させる。ロードは逆の手順で行う。
(もっと読む)
基板用のカセットの載置台
【課題】移載装置あるいはロードポート等の基板用カセットの載置台において、基板用の大形のカセットを該載置台に支持するとともに、簡単に振動を低減することが出来る機構を提供する。
【解決手段】複数本の桟18を底面に備えた基板用のカセットを載置するための載置台2であって、粘弾性体を備えた桟18の受台20が複数個、載置台2の本体に取り付けられ、受台20でカセットの底面を支持するように構成されていることを特徴とする。
(もっと読む)
載置プレート、基板移載装置および基板処理装置
【課題】基板を基板収納容器から確実に取り出すことができる載置プレート、基板移載装置および基板処理装置を提供する。
【解決手段】ウエハ1をポッドに出し入れするツィーザ50において、ツィーザ50はウエハ1を載置する基端側載置部52、52および先端側載置部54、54と、ウエハ1を前記ポッドから取り出す際にウエハ1の前記ポッド内の奥側の周縁部を引っ掛ける先端側引っ掛け部55、55と、ウエハ1の位置ずれを防止する座ぐり51と、を具備し、先端側引っ掛け部55、55は先端側が二股に分かれて配置され、先端側載置部54、54の載置面との夾角Θbが直角または鋭角に設定され、ウエハ1を引っ掛ける際には、前記ポッド内の位置決め部の近傍に位置するように構成されている。
(もっと読む)
半導体装置の製造装置及び半導体装置の製造方法
【課題】塗布対象物に接着剤の塗布膜を所望する膜厚で形成する。
【解決手段】半導体装置の製造装置1は、塗布対象物Wの塗布面に紫外線を照射する照射部5と、照射部5により紫外線が照射された塗布面に接着剤を塗布する塗布部6とを備え、照射部により紫外線が照射された塗布面に接着剤を塗布する。また前記塗布対象物を支持するハンドを有し、前記ハンドにより前記塗布対象物を搬送する搬送部をさらに備え、前記照射部は、前記搬送部により移動する前記塗布対象物の前記塗布面に前記紫外線を照射する。前記照射部は、前記紫外線を発生させるランプと、前記ランプによって発生する前記紫外線の光量を検出する検出器と、前記検出器によって検出された前記紫外線の光量に基づいて前記塗布面に対する照射光量を設定値に維持するように調整する調整手段とを具備する。
(もっと読む)
半導体装置の製造装置及び半導体装置の製造方法
【課題】半導体ウエーハなどの薄い紙状の対象物の正確な位置決めを行う。
【解決手段】半導体装置の製造装置1は、塗布対象物Wの中心をハンド3aの中心に合わせるセンタリング部4aを具備しており、センタリング部4aは、塗布対象物Wを支持する支持台31と、支持台31上の塗布対象物Wを押して移動させ、支持台31に対して位置決めされたハンド3aの中心に塗布対象物Wの中心を合わせる複数の押圧部32とを具備している。
(もっと読む)
基板移送ロボット
【課題】ガラス基板の移送時に、基板表面を損傷することなく安全に移送するための基板移送ロボットを提供すること。
【解決手段】基板(11)を移送するためのロボットアーム(10)と、当該ロボットアーム(10)から前記基板(11)を浮上させる浮上部(20)と、当該ロボットアーム(10)に装着されて前記基板(11)の重量を支持する基板支持部(30)とを含み、ガラス基板の移送時に、基板表面を損傷することなく安全に移送するための基板移送ロボットが提供される。
(もっと読む)
ウエハ搬送ロボット及びウエハの解放方法
【課題】ウエハの把持を解放した後におけるウエハの位置ズレを抑え、且つウエハの搬送に要する時間を短縮する。
【解決手段】ウエハ2が載置されるハンド20と、ウエハ2が載置される載置位置Aからウエハ2をハンド20から降ろす降ろし位置Dまでハンド20を移動させるための移動装置10において、ハンド20は、載置されたウエハ2を受け部23に押圧してウエハ2を把持し、且つ、押圧を解除してウエハ2を解放するための押圧装置30を備えており、制御装置40は、載置位置Aにてウエハ2が載置されると押圧装置30を制御してウエハ2を把持し、移動装置10を制御してハンド20をウエハ2を押圧する方向に移動させながら減速して降ろし位置Dへと移動させ、且つ、ハンド20が減速している間に、押圧装置30を制御してウエハ2を解放させるように構成されている。
(もっと読む)
静電吸着部材、静電吸着部材保持機構、搬送モジュール、半導体製造装置及び搬送方法
【課題】搬送アームに基板を静電吸着して搬送する場合において、真空中に電源やケーブルを導入する必要がなく、搬送モジュールにウェハを受け渡す際の基板の位置を高精度で制御することができ、更に、搬送モジュールで処理モジュールに搬送した後の基板の位置を高精度で制御することができる静電吸着部材を提供する。
【解決手段】静電吸着部材60は、基板Wを大気中と真空中との間で受け渡すロードロックモジュールと、基板Wを真空中で処理する処理モジュールとの間で、基板Wを搬送する搬送モジュールのピック31bに着脱可能に取り付けられ、ピック31bが搬送する基板Wに静電吸着する。静電吸着部材60は、ロードロックモジュールの載置ステージ70とピック31bとの間、又はピック31bと処理モジュールとの間で、基板Wに静電吸着した状態で、基板Wと一緒に受け渡される。
(もっと読む)
基板処理装置
【課題】半導体製造装置に投入されたFOUP内のウェハ位置ずれを、高価な装置機構を装備せずに、搬送方式を改造するだけで補正することができる基板搬送機能を備えた基板処理装置
【解決手段】基板を処理する処理室と、前記基板を予備室から前記処理室まで搬送する第一の搬送手段を備えた真空搬送室と、基板をキャリアから前記予備室まで搬送する第二の搬送手段を備えた大気搬送室と、前記第一の搬送手段及び前記第二の搬送手段を制御する制御手段とを備えた基板処理装置であって、前記制御手段は、前記キャリア内の前記基板を取り出す際に、前記基板の位置決めを行った後、前記基板を取り出すように前記第二の搬送手段を制御する。
(もっと読む)
位置合わせ装置、基板貼り合わせ装置および積層半導体装置の製造方法
【課題】振動の影響を受けることなく位置合わせする。
【解決手段】定盤から支持されて、第一基板を保持する第一ステージと、定盤から支持されて、第一ステージに保持された第一基板に対向させて第二基板を保持する第二ステージと、第二ステージまたは第二ステージに保持された第二基板を観察する第一顕微鏡と、第一ステージまたは第一ステージに保持された第一基板を観察する第二顕微鏡と、定盤から第一ステージへの振動伝播を抑制する第一除振部とを備え、第一顕微鏡および第二顕微鏡による観察から検出した相対位置に基づいて第一ステージ及び第二ステージの少なくとも一方を移動させることにより、第二ステージに保持された第二基板と、第一ステージに保持された第一基板とを互いに位置合わせする位置合わせする。
(もっと読む)
基板搬送装置
【課題】 本発明は、カセットに収納された半導体ウエハ等の基板を所定の場所に移載する基板搬送装置に関し、カセット内においてウエハ先端部の垂れ下がり量が比較的大きなウエハを搬出できる基板搬送装置を提供することを目的とする。
【解決手段】 基板の下面の外周部を保持する保持部と保持部を支持する支持部を備え、前記基板を搬送する搬送部と、前記支持部と前記基板とを相対的に上下に駆動する上下駆動部と、前記搬送部と前記上下駆動部とを制御する制御部とを備えた基板搬送装置であって、前記保持部は、略水平に延在する前記基板の手前側の両脇から奥中央方向に向う斜め方向に進退移動可能であることを特徴とする。
(もっと読む)
キャリア搬送装置
【課題】必要なキャリアの個数を抑えながらプロセス中のロットの滞留を防止し、プロセス効率を向上させることを目的とする。
【解決手段】キャリア1に収納された複数のウェーハ10の内、任意のウェーハ10を保持し、プロセス装置52に移載できるキャリア掛け換えフィンガー30を供えることにより、プロセス処理を行うウェーハ10を選択的にプロセス装置52に移載し、他のウェーハ10はキャリア1に残したまま他の工程に移動することができるため、必要なキャリア1の個数を抑えながらプロセス中のロットの滞留を防止し、プロセス効率を向上させることができる。
(もっと読む)
ステージ装置、位置合わせ装置および基板貼り合わせ装置
【課題】ステージ装置の作動効率を向上させる。
【解決手段】同一直線上にない三箇所で、ステージを上下方向に個別に移動する三つの上下アクチュエータと、作用線が上下方向に直交する面に沿ってステージの重心を通り、ステージを水平に移動する第1アクチュエータと、作用線の各々が上下方向に直交する面内で第1アクチュエータの作用線と直交して、ステージを水平に移動する第2アクチュエータおよび第3のアクチュエータとを備え、第2アクチュエータの作用線は、三つの上下アクチュエータのうちの少なくとも一の上下アクチュエータの作用線と交差し、且つ、第3アクチュエータの作用線は、三つの上下アクチュエータのうちの一の上下アクチュエータとは異なる少なくとも一つの上下アクチュエータの作用線と交差する。
(もっと読む)
板状部材の搬送装置及び搬送方法
【課題】搬送条件に応じて正圧吸引と負圧吸引との少なくとも一方を使用して板状部材を支持することができるようにすること。
【解決手段】搬送装置10は、ウエハWを厚さ方向両側から挟み込む位置に設けられた第1及び第2の支持手段11、12と、これらの支持手段11、12を移動可能に設けられた移動手段13とを備えて構成されている。第1の支持手段11は、気体を吸引することでウエハWを吸引して支持する負圧吸引手段16を備えている。第2の支持手段12は、ウエハWに気体を噴出することで当該ウエハWを吸引して支持する正圧吸引手段28を備えている。
(もっと読む)
1 - 20 / 60
[ Back to top ]