
国際特許分類[B25J13/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176) | 手でつかむ制御装置 (68)
国際特許分類[B25J13/02]に分類される特許
1 - 10 / 68
操作装置および可動機械制御システム
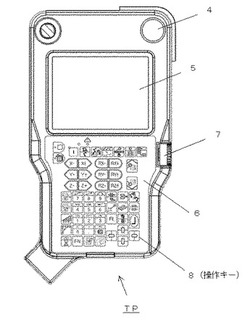
【課題】操作装置に配置されたキーの名称を各言語に対応させる場合は、各言語に応じたキーシート等を在庫として用意しておき、出荷国に応じた貼付作業を行う必要があるために、その分の管理コストや製造工数を必要とする。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には操作キーの名称が印字されていない。操作装置TPの本体または接続先のコントローラは、操作キーの名称をガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、操作キーの名称および画像が各言語に応じて表示部5に表示される。本発明により各国に応じた作業が不要になるというメリットがあると同時に、作業者は、これまでと同様に操作キーの名称を容易に知ることができる。
(もっと読む)
操作装置および可動機械制御システム

【課題】操作装置に印字されたキー名称が、作業者が使用する言語で表現されていない場合、操作を誤る可能性がある。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
(もっと読む)
3次元表示部を備えたロボット教示装置
【課題】作業セルにおける機械および関連するコンポーネントの3次元表示に優れた操作性の良い手持ち式の表示装置を提供すること。
【解決手段】3次元作業セルデータを表示するための方法および装置は、手持ち式ペンダント10,10Aを備える。この手持ち式のペンダントには、作業セルにおける機械および関連するコンポーネントのモデルを表す3次元作業セルデータが、表示されている。手持ち式のペンダントは、作業セルデータの3次元の視覚的表示を生成する表示部16を備える。ペンダントは、ユーザの視点を変更し、関連するプロセス情報とともに機械の移動を示すために、視覚的表示を操作するように、ユーザによって操作可能である。
(もっと読む)
肘掛型遠隔操縦装置
【課題】長時間使用しても疲れないように手首を含む肘をのせたまま操縦できる遠隔操縦装置を開発すること。
【解決手段】肘掛部材(10)、第1、2連結部材(31、32)、ベース連結部材(40)が平行四辺形をなし第1連結部材の垂直軸に対する傾斜角度を検出する第1角度検出手段とベース連結部材の第3連結軸まわりの角度を検出する第2角度検出手段とベース部材の垂直軸部材まわりの角度を検出する第3角度検出手段と、第1連結部材の傾斜角に応じて復元力を生成する第1のバネ機構と肘掛部材の傾斜角に応じて復元力を生成する第2のバネ機構とを備える。バネ(12,13,33,34)の端部に取り付けたワイヤ(16,38)がバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするように非円形プーリ(23、43)に巻張されている。
(もっと読む)
遠隔操縦装置
【課題】可動範囲の広い手首の3自由度回転運動と、指の開閉運動の動きを、操作性を損なうことなく検出、再現することができる簡潔な構造の装置を提供すること。
【解決手段】円弧状の右第1、2アーム(110,120)、及び、左第1、2アーム(210,220)とを具備し、左右第1アームの基端が同軸的に下部メカボックス(100)に回転可能に取り付けられ、下部メカボックスにはアーム角度位置検出手段(115,215)が備えられ、左右第1アームの先端に左右第2アームの基部がリンク連結され、左右第2アームの先端が上部結合軸(230)を介してリンク連結され上部結合軸に対して上部メカボックス(300)がその回りを回転可能に取り付けられ上部メカボックスは上部メカボックス角度位置検出手段(340)を具備し、またグリップ(500)と角度位置が検出可能な指従動リンク機構(400)が取付けられている。
(もっと読む)
操作入力装置およびこれを備えるマニピュレータシステム
【課題】操作入力装置において、操作ハンドルの移動量と、操作抵抗の力量との関係を良好に設定することができ、操作性を向上することができるようにする。
【解決手段】操作入力装置は、グリップ部1aと、グリップ部1aに対して移動可能に支持された操作ハンドル1cと、を有するマスタグリップ1と、操作ハンドル1cが操作された際に、操作ハンドル1cの移動量に応じて操作抵抗を発生させるばね2と、移動量に対する操作抵抗の力量を調整する力量調整部3とを備える。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より直感的な操作を可能として操作性を向上したマスタ操作入力装置及びそのようなマスタ操作入力装置を有するマスタスレーブマニピュレータを提供すること。
【解決手段】操作者によって把持された状態で位置及び姿勢を変化自在であって、位置及び姿勢の変化に応じて、スレーブマニピュレータの遠位端の関節の位置及び姿勢の指令値を与えるように構成された把持部101に、スレーブマニピュレータの遠位端の関節と同一の構造を有し、手動操作を受けてスレーブマニピュレータの遠位端の関節を駆動するための駆動量の指令値を与えるように構成された第1ロール関節102を設ける。さらに、第1ロール関節102にスレーブマニピュレータの遠位端の関節に設けられた先端効果器を設けるための関節を設ける。
(もっと読む)
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
マルチアームロボット遠隔手術におけるツール状態および通信のためのインディケータ
【課題】マルチアームロボット遠隔手術におけるツール状態および通信のための好適なインディケータを提供すること。
【解決手段】医療用および/またはロボットのデバイス、システムおよび方法は、マルチアームの遠隔ロボットまたは遠隔手術システムの各マニプレータアセンブリ(8、10)に関連するインディケータ(20)を提供し得る。例示的なインディケータは、関連する手術器具(28)を動かすマニプレータに取り付けられたマルチカラーの発光ダイオード(LED)(56)を備え、インディケータが任意の種々様々な信号を表示することを可能にする。本発明は、遠隔手術システムおよび/または遠隔手術チームのメンバー(A、O)の間の通信を容易にする追加のユーザインタフェースを提供し得る。
(もっと読む)
ロボット教示装置
【課題】イネーブルスイッチを備えるロボット教示装置において、ロボットの動作に関する物理量の調整を効率的に行うことのできる技術を提供する。
【解決手段】ロボット教示装置300は、所定の操作可能範囲内における操作量が大きくなるにつれ、ロボットを停止状態、作動状態、停止状態の順に切り換えるイネーブルスイッチ316と、前記操作可能範囲内のロボットが作動状態となる区間におけるイネーブルスイッチ316の操作量を検出する検出部と、ロボットが作動状態にある場合に、前記検出された操作量に応じて、ロボットの動作に関する物理量を調整する制御部と、を備える。
(もっと読む)
1 - 10 / 68
[ Back to top ]