
国際特許分類[B60G17/018]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両懸架装置 (7,837) | 車両または走行路面の状態の変化,例.速度または荷重による,に合わせて,ばねまたは振動緩衝器の特性を調節したり,車両の支持面と振動部との間隔を調整したり,または使用中の懸架装置をロックしたりする手段をもつ弾性的懸架装置 (3,807) | 電気または電子要素からなる調整手段 (2,855) | 特定の信号処理または調整方法の使用に特徴のあるもの (409)
国際特許分類[B60G17/018]の下位に属する分類
故障検出のためのもの (46)
国際特許分類[B60G17/018]に分類される特許
1 - 10 / 363
サスペンション制御装置
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
車両のロール角推定方法及び装置

【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
サスペンション制御装置
【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
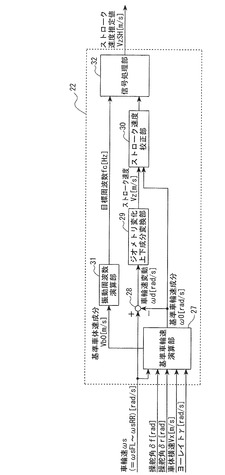
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
1 - 10 / 363
[ Back to top ]