
国際特許分類[G03B5/08]の内容
物理学 (1,541,580) | 写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ (245,998) | 写真を撮影するためのまたは写真を投影もしくは直視するための装置または配置;光波以外の波を用いる類似技術を用いる装置または配置;そのための付属品 (67,505) | カメラ,映写機または焼付機のために一般的に重要な焦点調節以外の、像または被写体面に対する光学系の調節 (3,727) | 後部を振るもの (54)
国際特許分類[G03B5/08]に分類される特許
1 - 10 / 54
撮影装置および撮影方法
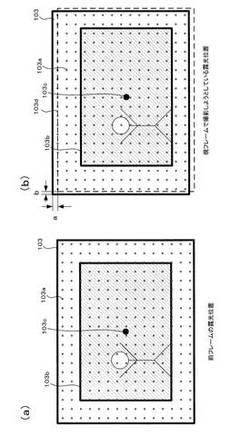
【課題】一部を焦点検出用素子に兼用する撮像素子を有する場合であっても、十分な画質を得ることの可能な撮影装置および撮影方法を提供する。
【解決手段】撮像素子103は焦点検出用画素103aを有し、被写体画像と撮像素子の相対的な移動量(a、b)を算出し、撮像素子による1フレームの撮像の完了後であって、次のフレームの撮像開始前に算出された移動量に基づいて撮像素子を移動させ、移動量に応じた切り出し位置103bで画像を切り出す。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置

【課題】非力なCPUでも、撮像エリアがその可動域を超えない範囲内で、なるべく長い撮影時間をリアルタイムかつ高精度に設定する。
【解決手段】撮像面の撮像エリア上での天体像の移動情報に基づいて、撮像エリアの所定時間あたりの光軸直交方向の理論平行移動量及び光軸と平行な軸回りの理論回転角度量を算出し、撮像エリアの可動域における、撮像エリアの基準姿勢位置からの光軸直交方向の実平行移動可能量及び光軸と平行な軸回りの実回転可能角度量を対応付けて保持する移動可能量テーブルを取得し、算出した撮像エリアの所定時間あたりの理論平行移動量及び理論回転角度量と、取得した移動可能量テーブルが保持する実平行移動可能量及び実回転可能角度量とを比較して、撮像エリアを該撮像エリアの可動域の範囲内で移動させながら天体自動追尾撮影を完了させるための撮影時間を設定する天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】追尾条件に応じて、無駄な演算処理を省いてCPUの負担を低減しながら、最適な駆動周期で撮像素子を駆動して天体を点像として撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮影装置に内蔵する所定の追尾手段を駆動させながら追尾撮影する天体自動追尾撮影方法であって、前記撮影装置の撮像素子の撮像面上に形成される天体像の、日周運動による所定時間あたりの撮像面上での移動距離を算出するステップ;及び算出した前記天体像の所定時間あたりの撮像面上での移動距離と、前記撮像素子の画素ピッチとに基づいて、前記追尾手段の駆動周期を設定するステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
撮像装置
【課題】 撮影時のシャッターの駆動により撮像素子に伝わる振動を低減し、高い外乱抑制特性を持たせる。
【解決手段】 被写体を撮像するための撮像素子1と、撮像素子を支持し、撮像素子の撮像面と垂直な軸方向に力を受けて変形する板バネ10と、板バネに抗して撮像素子を光軸方向に移動させる撮像素子駆動手段3と、撮像素子の光入射側に位置し、撮像素子への光入射を制御するシャッター装置7と、シャッター装置を駆動するためのシャッター駆動信号を発生するシャッター駆動信号発生手段8と、シャッター装置を駆動することにより発生する外乱による、撮像素子の振動を抑制するために、シャッター駆動信号に基づいて、撮像素子を駆動する駆動信号を生成し、撮像素子駆動手段を制御する制御器13を有する。
(もっと読む)
駆動装置およびそれを用いた画像装置
【課題】簡単な構成でXY平面に沿う方向に加えて、Z軸方向の駆動が可能で、駆動時には摩擦を低減して駆動力を大きくし、停止時には精密な位置の保持が可能な駆動装置および、その駆動装置を搭載した画像機器を提供する。
【解決手段】駆動装置300は、フレーム167と、フレーム167により支持される接触体311と、接触体311に押圧されて支持されるホルダ145と、接触体311が構成する支持面に沿う方向に、フレーム167を相対移動するVCM320,321と、接触体311をフレーム167に対してZ方向に変位させる振動子310とを備える。駆動時には、振動子310により接触体311をZ方向に振動させることにより、接触体311とホルダ145との間の摩擦力を低減して、より大きな駆動力を発生させる。
(もっと読む)
ディジタルカメラ
【課題】本発明は、振動型ローパスフィルタ機構を効率的かつ効果的に動作させることのできるディジタルカメラを提供することを目的とする。
【解決手段】本発明のディジタルカメラ(1)は、撮像素子(13)上の被写体像を振動させる振動型ローパスフィルタ手段(14)と、前記撮像素子(13)の露光時における前記振動型ローパスフィルタ手段(14)の駆動周波数を、その露光期間の長さに応じて設定する制御手段(15)とを備えたことを特徴とする。例えば、制御手段(15)は、高速のシャッタスピードによる撮像時には高周波数、中速のシャッタスピードによる撮像時には中周波数、低速のシャッタスピードによる撮像時には低周波数などと設定する。
(もっと読む)
撮像装置および撮像装置の制御方法
【課題】撮像素子の移動機構の薄型化を図ることができる撮像装置を提供する。
【解決手段】撮像素子3と、撮像素子3を保持する撮像素子保持板4と、撮像素子保持板4を弾性支持する板バネ5と、撮像素子3を駆動する駆動手段と、撮像素子3が出力する信号を処理し、板バネ5に固定された信号処理基板11とを備える撮像装置を設ける。そして、駆動手段が、板バネ5を弾性変形させることによって、撮像素子3を光軸Lに沿った方向に移動させ、信号処理基板11を撮像素子3とは逆位相側に移動させる。
(もっと読む)
撮像素子の駆動機構
【課題】撮像素子に振動や不測の傾斜が生じることを防止できる撮像素子の駆動機構を提供する。
【解決手段】撮像面101を有する撮像素子1を撮像面101に対して直角な方向に駆動する撮像素子の駆動機構であって、撮像素子1が設けられる被動リンク5cと回転対偶6a,6bを介して撮像素子1が設けられる被動リンク5cに回転可能に連結される二組の駆動リンク5a,5bとを備える第一の平面三節リンク機構60と、二組の駆動リンク5a,5bのそれぞれに回転対偶4a,4bを介して連結されており二組の駆動リンク5a,5bのそれぞれを撮像素子1の撮像面101に平行な方向に駆動できる二組の駆動部3a,3bと、撮像素子1を撮像面101に対して直角な方向に駆動されるように案内する案内機構10a,10bとを備える。
(もっと読む)
撮像装置
【課題】撮像素子の移動機構において、光軸に対する撮像面の精度を維持しつつ撮像素子の移動量を大きくすること。
【解決手段】撮像装置は、被写体からの光が結像される撮像素子1の移動機構を備える。板ばね3は撮像素子1のフレーム2に取り付けられ、光軸方向にて撓み変形可能な弾性部材である。板ばね3を撓ませる圧電素子3aが板ばね3に取り付けられており、支持部4Lと4Rは板ばね3を支持する。支持押圧部5は板ばね3を支持部4Lおよび4Rの側にそれぞれ付勢する。支持部4Lおよび支持押圧部5は板ばね3を、撮像素子1の撮像面方向(X軸方向およびY軸方向)と光軸(Z軸)方向にて拘束し、支持部4Rおよび支持押圧部5は板ばね3を光軸方向のみで拘束する。
(もっと読む)
立体画像撮像装置
【課題】仮想的に形成される瞳の間隔を変化させることなく、フォーカス位置を調整できるようにする。
【解決手段】被写体を実像または虚像として形成する機能を有する対物光学系を備える。また、複数の独立した光学系により、対物光学系10の異なる経路から出射された複数の被写体光束を視差画像としてそれぞれ改めて結像させる複数の結像光学系20を備える。さらに、複数の結像光学系20により結像された視差画像を画像信号に変換する複数の撮像素子202を備える。その上で、複数の結像光学系20の各前側主点sから対物光学系10の光軸Ax1へ垂線を下ろした際の垂線の長さと、垂線と対物光学系の光軸とが交わる交点xと対物光学系10の焦点fとを結ぶ線分の長さとの比が一定となるように、各結像光学系20の前側主点sを配置または移動させる。
(もっと読む)
1 - 10 / 54
[ Back to top ]