
オムロン株式会社により出願された特許
1,011 - 1,020 / 3,542
スイッチ故障検出装置及び方法
【課題】 短い判定時間で誤判定を生じることなく良好な応答性のスイッチ故障検出装置及び方法を提供する。
【解決手段】 連動してON/OFFする少なくとも二つの接点の故障を検出するスイッチ故障検出装置において、前記二つの接点の全ON状態を判定する判定手段(10)と、前記判定手段の判定結果に従って所要の制御の開始を指示する制御手段(10)とを備え、前記判定手段は、前記二つの接点のうち故障していない方の接点が、ユーザ操作に応答して実際にON/OFFすることを確認してからその判定結果を確定することを特徴とする。
(もっと読む)
電動式パワーステアリング制御装置

【課題】運転者が感じている操舵感覚に応じた的確な補助力を供給して、操舵フィーリングを良好にすることが出来る電動式パワーステアリング制御装置を提供する。
【解決手段】ステアリングの操舵トルクTに基づいて微分指令値T1を算出し、操舵トルクTと車速Vに基づいて微分ゲインgと第1電流指令値I1とを算出し、車速Vとモータの回転速度REとに基づいて収斂値ASを算出し、操舵トルクTと角速度AVに基づいてゲインGを算出し、微分指令値T1と微分ゲインgとに基づいて第2電流指令値I2を算出し、収斂値ASとゲインGとに基づいて収斂指令値asを算出し、第1電流指令値I1と第2電流指令値I2とに基づいて第3電流指令値I3を算出し、第3電流指令値I3と収斂指令値asとに基づいて駆動電流指令値Idを算出し、当該駆動電流指令値Idに基づいてモータを駆動する。
(もっと読む)
認識処理方法およびこの方法を用いた画像処理装置
【課題】認識精度を確保しつつ、一定の時間内に対象物を認識する処理を終了する。
【解決手段】認識対象物のモデルの特徴点群から各辺の長さが所定の基準値を満たす三角形を抽出し、モデル三角形として登録する。認識対象物の2次元画像から抽出された特徴点群についても同様に、基準値を満たす三角形を抽出して比較対象三角形として登録する。つぎにモデル三角形と比較対象三角形とを順に対応づけ、頂点の対応関係を複数とおりに設定して、対応づけられた頂点(AとA´、BとB´、CとC´)の座標を用いて、両三角形の対応関係を表す変換パラメータを算出する処理と、モデルの特徴点群と対象物の特徴点群との関係に対する当該変換パラメータの適合度を求める処理とを実行する。そして、対応づけ毎に求められた適合度に基づいてモデルの特徴点群と認識対象物の特徴点群との対応関係を示す変換パラメータを特定することによって、対象物を認識する。
(もっと読む)
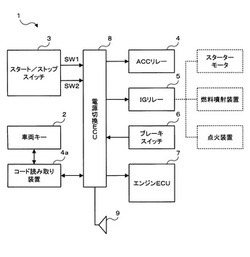
制御システム
【課題】エンジン始動時における車両の各部の状態を示すデータを確実に保持出来る制御システムを提供する。
【解決手段】制御部1は、始動開始信号STに基づいて、駆動制御装置3,6へのクランキング信号CRの出力、電源装置16の制御による車両200の各部への電力供給、計時装置31による計時開始を行う。駆動制御装置3,6は、電力供給に基づいて、周辺装置21,24の制御を開始し、検出部23,26にて、始動開始装置11のON操作時における各周辺装置の状態を検出する。そして、検出結果であるデータを、一時記憶部4,7に記憶した後、クランキング信号CRに基づいて、各一時記憶部に記憶されたデータを、記憶部5,8内の所定の記憶領域に記憶する。計時装置31による計時時間が、予め設定された所定時間を超えると、制御部1は、始動制御装置2へクランキング信号CRを出力し、原動装置12が作動する。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】容量をできるだけ少なくして精度の良い3次元モデルを作成する。
【解決手段】3次元認識の対象とするワークの実物モデルWMに対し、ステレオカメラによる3次元計測を複数の方向から実行する。つぎに、各計測により復元された3次元情報のうちの所定数([12][3][6][9]の各計測ポイントの3次元情報)を位置合わせして統合することにより、仮の3次元モデルを作成する。さらに、統合されなかった3次元情報を対象に、仮の3次元モデルによる認識処理を実行し、その認識結果が正しくないと判定された3次元情報(計測ポイント[10]の情報)を仮の3次元モデルに位置合わせしてから統合する。最終的に、正しく認識されなかった3次元情報のすべてが追加された3次元モデルを本登録する。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】実物モデルとカメラとの位置関係を任意に変更して3次元計測を行い、各計測により復元された3次元情報を位置合わせして統合する方法でも、精度の良い3次元モデルを作成できるようにする。
【解決手段】3次元認識の対象とするワークの実物モデルWMの所定箇所に、向きを一意に特定できる形状の多角形のマークMを取り付ける。そして、このマークMが各カメラ11,12,13の視野に含まれる状態が維持されるように実物モデルWMの姿勢を変更して3次元計測を行う処理を、複数回実行する。さらに、毎回の計測により復元された3次元情報のうちの2以上の所定数を選択し、これらを位置合わせして統合した後、統合された3次元情報からマークMに対応する情報を削除または無効化し、その処理後の3次元情報を3次元モデルに設定する。
(もっと読む)
車両認証制御装置
【課題】 部品(好ましくはステアリングロックユニット)を交換した際のID登録作業の簡便化を図った車両認証制御装置を提供する。
【解決手段】 第1判定手段(4)は携帯機(7)の第1識別情報と認証装置(1)の第2識別情報とを照合してそれらの組み合わせが正当なものであるか否かを判定する。第2判定手段(4)は認証装置とは異なる部品(2)の第3識別情報と認証装置の第2識別情報とを照合してそれらの組み合わせが正当なものであるか否かを判定しまた部品に第3識別情報が登録されていない場合は部品が未使用品であると判定する。登録手段(4)は部品が未使用品である場合に第2識別情報を第3識別情報として部品に登録する。
(もっと読む)
データ名決定装置
【課題】ユーザの所望するファイル名などを自動的に決定するための装置を提供すること。
【解決手段】データ名決定装置は、入力された画像中に含まれる文字列を抽出・認識し、各認識結果の文字列をその内容などに従って複数のカテゴリに分類する。ユーザによって、ユーザがデータ名として所望するカテゴリが指定・設定などされると、データ名決定装置は、ユーザによる指定・設定に応じたカテゴリに属する文字列を、所定のデータの名前として決定する。
(もっと読む)
検査装置および検査方法
【課題】検査対象を撮像して検査する場合の検査の高速化を図る。
【解決手段】ラインセンサカメラ6を、液晶パネル9に対して、矢符A1に示すように正方向に移動させて液晶パネル9を撮像し、矢符B1に示すようにライン幅方向にずらし、矢符A2に示すように逆方向に移動させて液晶パネル9を撮像し、以下同様にラインセンサカメラ6を、正方向および逆方向に移動させて液晶パネル9を1ライン分ずつ撮像する。正方向に移動させて撮像した画像30と、逆方向に移動させて撮像した画像31とは、上下が反転するので、正逆方向判別部17でいずれの方向であるかを判別し、画像処理部18では、テンプレート画像19を、判別された方向に応じて、反転処理し、あるいは、反転処理することなく、マッチングを行い、更に、欠陥を検査する。
(もっと読む)
スイッチ装置
【課題】スイッチ装置の厚みを抑制する。
【解決手段】基板34には、磁気センサ35が設置される。ホルダ32は、基板34に対して相対的に回転自在であり、サイドスタンドの回動に伴って回転する。このホルダ32には、磁石が配置される磁石保持部33が設置される。ホルダ32は、基板34と基板34の磁気センサ35の設置面34Aに平行な方向に対向している。本発明は、例えば、二輪自動車のサイドスタンドに装着されるスイッチ装置に適用することができる。
(もっと読む)
1,011 - 1,020 / 3,542
[ Back to top ]