
Fターム[2B043EA02]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 操舵又は操向の状況 (291) | 操向ハンドル又はレバーの操作 (138)
Fターム[2B043EA02]に分類される特許
1 - 20 / 138
乗用管理機
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
田植機

【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
苗移植機
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
水田作業機
【課題】水田作業機において、畦際での旋回終了を適切に検出する。
【解決手段】右の車輪2に動力を伝達する右のサイドクラッチ40と、左の車輪2に動力を伝達する左のサイドクラッチ40とを備える。操向操作自在な車輪1が直進位置A1側から右又は左の操向限度A3側に操向操作されると、右又は左のサイドクラッチ40が遮断状態に操作され、操向操作自在な車輪1が右又は左の操向限度A3側から直進位置A1側に操作されると、遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されるように構成する。車輪2の回転数に基づいて機体の前進及び後進の走行距離を検出する走行距離検出手段を備える。遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されたことと、走行距離検出手段で検出された機体の前進の走行距離と機体の後進の走行距離との差、とに基づいて旋回終了を検出する。
(もっと読む)
作業車両
【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
苗移植機
【課題】簡易な構成の旋回内側の伝動調節によってコストの低減とやメンテナンス性の向上を図り、突然のスリップ発生にも対応を可能として植付精度と作業能率を確保でき、かつ、旋回に必要な出力の確保が可能となる苗移植機を提供する。
【解決手段】苗移植機は、全輪駆動の前後輪10,11を備えた走行車体2と、前輪10のデフロック機構51a付きデフ装置51と、後輪11のクラッチ機構18cと、旋回内側の後輪伝動を停止する制御ロッド部材52と、旋回時に昇降リンク機構3により上昇可能に支持した植付装置4とを備えて構成され、上記左右のクラッチ機構18c,18cの動作規制により左右の後輪動力を維持可能に設定するクラッチ設定機構53を設け、機体旋回時の前輪10のスリップによるデフロック機構51aの作動とともに植付装置4の上昇位置を低く抑える上昇規制機構Cを上記昇降リンク機構3に設けたものである。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 旋回開始時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上でなく直進状態に戻した操作状態であることを条件に、更にその後、前記カウントが植付部を下降させたときの第一の所定値よりも大きい第二の所定値になったとき、植付クラッチを入にする連動制御を備え、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上であれば、連動制御を終了する制御装置を設けた田植機とした。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
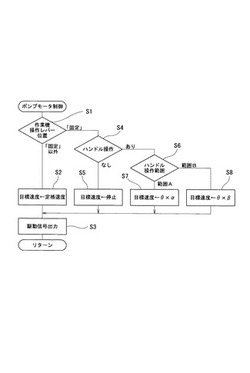
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】アクチュエータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が備えられ、機体の旋回走行の開始に伴って旋回行程中における機体の位置を検出する機体位置検出手段51と、機体位置検出手段51の検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置にあるときに、アクチュエータM3を作動状態側に切り換える作動部操作手段53とを備える。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記操向手段の操作量に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、調節量を操向手段の操作量に対応させて変更することで、操向手段による大雑把な旋回操作と旋回量微調節手段による補足的かつ微細な旋回操作を一体密接的に関連づけることができる。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
作業車両
【課題】旋回内側後輪のスリップが発生する圃場状況にあっても、スリップによる不安定走行を回避して円滑な旋回走行を確保するとともに、後輪サイドクラッチの伝動ショックを緩和してオペレータおよび機体への負担を低減することができる作業車両を提供する。
【解決手段】作業車両は、旋回開始により、作業部4停止、サイドクラッチによる内側後輪動力の切断、その転動距離による作業部4の再稼動の一連の旋回連動制御をするように構成され、上記サイドクラッチは、摩擦板伝動により半クラッチ動作可能に構成した上で、制御装置163による旋回連動制御について、内側サイドクラッチの一定周期の断接動作によって旋回内側の後輪11に走行動力を間欠伝動可能に構成するとともに、間欠伝動のサイドクラッチ接続行程におけるサイドクラッチの動作速度を半クラッチを現出する動作速度に抑えるように構成したものである。
(もっと読む)
乗用型田植機
【課題】 本発明の課題は、旋回時の苗植え付けなどの諸作動を自動的に行わせることができるようにすることである。
【解決手段】 機体上に設けたエンジンと、機体の進行方向に向かって左右に設けた左右前輪及び左右後輪と、該左右前輪を操向操作する操向操作具と、左右後輪のそれぞれの伝動軸に設けたエンジン駆動力を伝達・非伝達するクラッチと、操向操作具に連動して前記左右いずれかのクラッチを作動させる連動ロッド(180,180)とを備えた走行車両を設け、該走行車両には昇降用リンク装置を介して苗植付装置を装着した乗用型田植機において、操向操作具による操向角度の検出により旋回中であると判断すると、後輪の伝動軸の回転数を検出し、該回転数が第一の設定値を超えると苗植付装置を下降し、前記回転数が第二の設定値を超えると苗植付装置を作動させる制御装置を設けた。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置が検出されると作業装置を作業状態に操作するように構成する場合、作業装置の作業状態への操作が適切に行われるようにする。
【解決手段】機体の旋回開始からの機体の走行距離を検出する走行距離検出手段56、又は機体の旋回開始からの経過時間を検出する経過時間検出手段57を備える。走行距離検出手段56の検出値が設定距離に達するまでに、又は経過時間検出手段57の検出値が設定時間に達するまでに、作業装置操作手段55による作業装置の作業状態への操作が終了しなければ、作業装置操作手段55の作動を停止させる停止手段58を備える。
(もっと読む)
1 - 20 / 138
[ Back to top ]