
Fターム[2B062BA45]の内容
移植機(田植機の要素) (4,646) | 構成、配置 (1,745) | 操向装置 (142) | 自動操向 (28)
Fターム[2B062BA45]の下位に属するFターム
コンピュータによるもの (15)
操向センサー (9)
Fターム[2B062BA45]に分類される特許
1 - 4 / 4
苗移植機
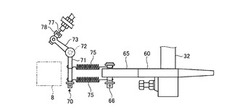
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
移動作業機の自動操縦装置

【課題】移動作業機の例として、稲刈り機やトラクターなどが挙げられるが、これらの移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】レーザー光の発信機能及び受信機能を有し、目標物の方向及び距離を検出する測定装置を備えた移動作業機があって、移動作業機の作業領域の周囲に反射材を有する複数の案内支柱を設置し、案内支柱を目標物として測定装置の検出した情報を基に移動作業機の進路方向及び移動距離を演算する演算装置と、演算装置の結果を基に移動作業機の操縦装置を操作する制御装置を備えることにより、案内支柱に沿って移動作業機が自動で作業を行うことを可能にした。
(もっと読む)
農作業機の自動操向制御装置
【課題】本発明では、発信機と受信機等の通信機器を設けることなく、圃場に凹凸が有っても自動的に直進走行になるように制御する自動制御の操向制御装置を設けることで、農作業機を運転して農作業を行う作業者の労力を軽減し効率的作業を行えるようにすることが課題である。
【解決手段】走行装置を操向する操向制御装置と機体の進行方向を検出する進行方向検出手段を機体に設け、該進行方向検出手段が直進からずれたことを検出すると操向制御装置を直進に修正すべく制御したことを特徴とする農作業機の自動操向制御装置とした。
(もっと読む)
農用作業車
【課題】GPSにより車体位置を計測しつつ、自律的に直進走行する農用作業車において、次工程への遷移時に植付け開始位置の位置決めが容易にできる技術を提供する。
【解決手段】GPSユニット102と、処理部110を備え、GPSユニット102により計測される位置情報に基づいて、処理部110によりティーチング経路を生成し、さらに、処理部110により前記ティーチング経路に対して平行な目標経路を生成し、該目標経路上を自律的に走行する田植機1において、オペレータにより、自律運転SW48が操作されることにより、次の目標経路へ向けて自動的に旋回し、かつ、旋回動作の終了後に引き続き、前記次の目標経路上を自律的に走行するように構成する。
(もっと読む)
1 - 4 / 4
[ Back to top ]