
Fターム[2B062BA46]の内容
移植機(田植機の要素) (4,646) | 構成、配置 (1,745) | 操向装置 (142) | 自動操向 (28) | コンピュータによるもの (15)
Fターム[2B062BA46]に分類される特許
1 - 15 / 15
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
田植機

【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
水田作業車
【課題】水田作業車において、右又は左のマーカーが自動的に作用姿勢に操作される機能及び作業装置が自動的に作業状態に操作される機能を備えた場合、両方の機能を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
移植機
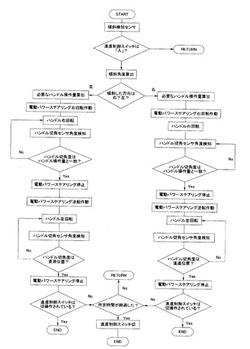
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
農用作業車
【課題】自律走行を行う農用作業車において、オペレータが現在の機体位置の情報(即ち、機体位置が目標経路または目標方向に合致しているか否か、または、目標経路と合致していない場合には機体のズレ方向)を容易に知ることができる技術を提供する。
【解決手段】目標経路の生成後において、該目標経路に対する田植機1の機体位置の変位方向を表示し、かつ、田植機1が自律走行可能か否かを表示する自律走行位置表示ランプ45を具備する構成とする。
(もっと読む)
農用作業車
【課題】GPSにより車体位置を計測しつつ、自律的に直進走行する農用作業車において、ティーチング経路を折れ線状や曲線状に生成することを可能とする技術を提供する。
【解決手段】GPSユニット102と、処理部110を備え、目標経路上を自律的に走行する田植機1であって、GPSユニット102により計測される位置情報に基づいて、ティーチング開始時から終了時まで、田植機1の車体位置を所定の間隔ごとに測定して、複数の車体位置(測定点Aから点G)を記録し、該記録に基づいて、走行した前後二つの測定点を直線で結ぶ線分の集合として、処理部110によりティーチング経路を生成し、該ティーチング経路に対して平行な目標経路を生成し、該平行な目標経路の線間距離は作業幅(即ち、植付幅aに植付条数bを乗じた距離(6a))とする。
(もっと読む)
作業車用制御装置
【課題】大廻り旋回についての確実な事前判定により、自動旋回制御に反映して大廻り旋回の影響を小さく抑えることができる作業車用制御装置を提供する。
【解決手段】作業車用制御装置は、旋回走行中の走行車輪の転動量に基づいて旋回行程の所定の基準位置nによる作業機動作制御を行う制御処理部21を備えて構成され、上記制御処理部21は、走行車輪の左右回転速度差が所定の基準値より小なる場合に、上記基準位置nを所定の補正処理した補正基準位置により作業機動作制御を行うように構成したものである。
(もっと読む)
複数条植え移植機及び複数条植え移植機による植付け方法
【課題】畦クラッチ等による煩雑な植付け条調整操作および植付け条別苗量管理による煩雑な苗補給を要することなく、植付け作業能率の向上とともに機体構成の簡易化を可能とする複数条植え移植機および同複数条植え移植機による植付方法を提供する。
【解決手段】複数条植え移植機は、往復植付け行程による植付け範囲の圃場幅Bをその一側端から所定の植付け条間寸法で且つ所定の植付け条数で複数条植え走行するように構成され、上記圃場幅Bを認識する認識手段と、該認識手段で認識する圃場幅Bを往復植付け行程の行程間ピッチDを前記所定の植付け条間寸法として等間隔に往復植付けするものとした場合に生じる植付け条数に満たない未植付け部分の幅に基づいて、前記圃場幅B全体を植付け条数の整数倍の条数で植付けできるように往復植付け行程の行程間ピッチDを演算する演算手段とを設けたものである。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
田植機の画像処理装置
【課題】 田植機の画像処理装置において、田面に植え付けられた苗と同じような色相を
備えたものが田面に映っても、これを削除(無視)して、田面に植え付けられた苗に相当
する画素を判断することができるように構成する。
【解決手段】 撮影された画像の画素において、赤成分、緑成分及び青成分、彩度Sに基
づいて、田面に植え付けられた苗に相当する画素を判断する。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、自動走行手段及び人為選択操作具を備えた場合、人為選択操作具の操作により自動走行手段の作動の選択が適切に行われるように構成する。
【解決手段】 前輪1を操向操作可能なアクチュエータ27を備えて、アクチュエータ27を前輪1に機械的に連係させる連係状態及び解除状態に設定自在に構成する。検出手段38の検出に基づいて機体が既に植え付けられた隣の苗列L1に沿って走行するように、アクチュエータ27により前輪1を自動的に操向操作する自動走行手段を備える。人為選択操作具29により自動走行モードが設定されると、アクチュエータ27が連係状態に設定されて自動走行手段が作動し、人為選択操作具29により手動走行モードが設定されると、アクチュエータ27が解除状態に設定される。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影して線分を設定する作業車の画像処理装置において、物体の色相に近い色相を備えた外乱の影響をできるだけ小さくする。
【解決手段】 物体の並び方向と交差する複数の分割線E1により、画像を複数の領域B1に分割する。領域B1の各々において、物体の色相を備えた画素を候補画素として抽出する。領域B1の各々において、複数の候補画素のうち、最上位から所定個数の候補画素G1,G2,G3,G4を選択する。選択された所定個数の候補画素G1,G2,G3,G4に沿って線分を設定する。
(もっと読む)
操向制御方法及び装置
【課題】
視界に入っている一行程前に移植された苗一列全てに対してただ一つの直線を定め、これに対して平行に移植機を走行させる。
【解決手段】
移植機に設けた撮像手段によって既植の苗列を撮像して苗列の画像情報を取得するステップと、該画像情報から苗列領域が抽出された2値画像を取得するステップと、該2値画像を逆透視変換して2値化された苗列領域の仮想地平面画像を取得するステップと、該仮想地平面画像において該苗列領域を直線で近似するステップと、該直線に対する移植機の位置情報に基づいて操向制御を行うステップとを有する。
(もっと読む)
1 - 15 / 15
[ Back to top ]