
Fターム[2B062CB11]の内容
移植機(田植機の要素) (4,646) | センサー (158) | センサー感度及び作動時間の調節 (10)
Fターム[2B062CB11]の下位に属するFターム
不感帯調節 (1)
Fターム[2B062CB11]に分類される特許
1 - 9 / 9
移植機
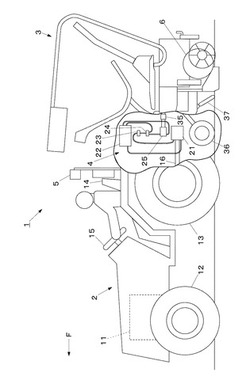
【課題】 株間を容易にかつ柔軟に調節することができるようにする。
【解決手段】 本発明の移植機1は、圃場を走行する走行車体2と、該走行車体2に連結され、該走行車体2の走行に伴って圃場に苗を植え付ける移植装置3とを備えている。移植装置3を駆動するモータ25を含む駆動装置4と、該駆動装置4を制御する制御装置5とを備えており、移植装置3は、モータ25の回転速度に応じた植付速度で圃場に苗を植え付けるように構成されており、制御装置5は、走行車体2の走行方向における苗同士の株間の目標値を設定する株間設定ダイヤルと、前記株間を直接的又は間接的に表す情報を計測する株間計測手段とを備え、該株間計測手段から求めた前記株間の計測値が、前記株間の目標値と一致するようにモータ25の回転速度を制御するように構成されている。
(もっと読む)
作業車の作業装置昇降構造

【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
水田作業車
【課題】走行速度が変わっても苗植付部4の苗植付装置42の圃場に対する昇降制御を適切に行える水田作業車を提供すること。
【解決手段】水田作業者の走行速度が速いと硬軟センサ47が圃場の土壌が硬いと判断する傾向にあり、逆に走行速度が遅いと硬軟センサ47が圃場の土壌が軟らかいと判断する傾向にあるため、走行速度が急激に変化すると硬軟センサ47の検出値が不適正に変化して不安定になり、苗植付部4の昇降制御における制御感度が不適正になるおそれがある。これに対処するため、本実施例では、所定時間内に油圧式無段変速装置22の変速比又はエンジン回転数が所定以上変化して水田作業者の走行速度が急激に大きく変化すると硬軟センサ47の検出結果を無視するように制御装置48を機能させ、苗植付部4の昇降シリンダ33の作動制御を停止する。こうして、硬軟センサ47の誤検出の影響を苗植付装置42が受けない。
(もっと読む)
移植機
【課題】 苗植付装置の昇降制御感度の設定域を広くし乍ら、制御感度の微妙な調節を容易に行える移植機を構成する。
【解決手段】 走行機体の後部にリフトシリンダ4で駆動昇降自在に苗植付装置を連結し、この苗植付装置に備えた接地フロート20を、設定された制御感度に対応する目標姿勢に維持するよう該苗植付装置3の昇降を行う制御装置34を備え、制御感度を設定する人為操作型の感度設定器47と、この感度設定器47の設定域をシフトさせる人為操作型の補正スイッチ51とを備えた。
(もっと読む)
水田作業機
【課題】 接地フロート12が設定姿勢になるように水田作業装置10を昇降制御するものでありながら、自走車体や水田作業装置の走行速度や姿勢の変化にかかわらず、接地フロート12が田面に対して適切な姿勢で接地するように、かつ、ハンチングが発生しにくいようにする。
【解決手段】 昇降制御手段55は、フロート角センサ50による検出情報を基に設定制御目標フロート角を設定し、フロート角センサ50による検出フロート角が設定制御目標フロート角になるようにリフトシリダ6を操作する。昇降制御手段55は、車速感応モードになると、車速センサ52による検出車速が高速であるほど制御感度がより鈍感になるように制御感度を補正する。昇降制御手段55は、傾斜角補正モードになると、自走車体の傾斜角センサ51による検出前上がり傾斜角が設定値より大であるほど設定制御目標フロート角に対応するフロート姿勢が前下がり方向になった状態の設定制御目標フロート角を設定する。
(もっと読む)
作業機
【課題】 苗の植付をする田植え機等の作業機において、作業装置を圃場に接地させ、油圧の感度を鈍感側から設定値に戻す際に、作業装置のハンチングを誘発することなく、しかもフロートによる泥押等を発生させないようにした作業機を提供する。
【解決手段】 作業装置を下降させ、植付部(検知体)の圃場への接地を検知して油圧バルブの開度を調整して感度調整を行う際に、作業装置の下降開始時には、検知ワイヤに位置を11/11(鈍感側)に設定し、検知体の接地を検出した後、設定された鈍感側の検知感度と作業時の検知感度1/11(敏感側)との中間位置まで1、5秒(1〜2秒)、作業時の検知感度1/11まで3秒(2〜4秒)の時間をかけてゆっくりと変化させ、検知感度の切換によるハンチングの誘発や泥押しを防止する。
(もっと読む)
圃場走行作業用農作業車
【課題】圃場の往復作業走行の折返し部に来た際に、農作業装置の下降タイミングの調節を含む植付部の取扱いを要することなく、土壌の硬度に応じた機器制御により旋回走行跡の荒れに適切に対処することができる圃場走行作業用農作業車を提供する。
【解決手段】圃場走行作業用農作業車は、旋回操作に応じて圃場を旋回走行しうる機体と、この機体に対して昇降可能に支持されて作業位置で圃場作業をするとともに均平整地用のフロート15を備えた植付部7と、この植付部7について旋回操作の検出に応じて非作業位置への上昇、作業位置への下降の各動作を旋回走行過程の所定のタイミングで動作制御する制御部21とを備えて構成され、上記植付部のフロート15に圃場作業対象となる土壌の高さ位置を感度調節可能に検出するフロートセンサ15sを設け、このフロートセンサ15sの感度と連動して上記植付部の下降動作のタイミングを変更するように制御する。
(もっと読む)
1 - 9 / 9
[ Back to top ]