
Fターム[2B062CB20]の内容
移植機(田植機の要素) (4,646) | センサー (158) | その他 (4)
Fターム[2B062CB20]に分類される特許
1 - 4 / 4
作業車
【課題】操作の煩わしさの少ない状態で燃料消費の抑制や騒音の低減を図ることが可能なものでありながら、燃料用の報知処理が誤って実行される不利を回避することが可能な作業車を提供する。
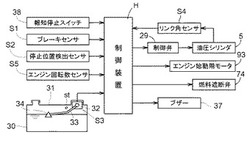
【解決手段】キースイッチがオン操作されている状態において、キースイッチ以外の他の操作具の操作に基づいてエンジンの作動を停止させるエンジン停止処理、及び、エンジンを始動させるエンジン始動処理を実行する制御装置Hが、キースイッチがオン操作されている状態において、燃料タンク30が所定の燃料貯留状態になったことを判別すると、ブザー37にて報知させる燃料用報知処理を実行し、エンジン停止処理を実行することによりエンジンの作動を停止させているときは、燃料用報知処理を実行しないように構成されている。
(もっと読む)
移植機

【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
乗用作業機
【課題】本発明では、旋回後に所定の動作を自動的に行わせる旋回連動自動制御装置を設けた乗用作業機において、旋回走行中に旋回内側の車輪が滑らないで旋回後の諸作業動作の自動制御が正確に働くようにすることが課題である。
【解決手段】乗車機体を支持する前輪と後輪の四輪を弾性支持力の調整可能な前輪サスペンション機構と後輪サスペンション機構3Sで支持すると共に前輪或は後輪の左右に旋回時の内側車軸回転数を検出する伝動軸回転数センサを設け、さらに、該前輪サスペンション機構と後輪サスペンション機構3Sの弾性支持力を制御する制御装置を設け、該制御装置で前記伝動軸回転数センサの検出回転数から算出する旋回角度が所定角度を超えると前記前輪サスペンション機構と後輪サスペンション機構3Sの旋回内側の弾性支持力を外側の弾性支持力に対して相対的に硬くなるように変更すべく制御した乗用作業機の走行安定制御とした。
(もっと読む)
移植機
【課題】専用の表示部を設けることなく、センサチェックモードにおいて実際のセンサデータを目視可能とし、高度なメンテナンスを可能にする。
【解決手段】稼働時間を積算し、該積算した稼働時間を表示器16に表示させる制御部15を備えた乗用田植機において、制御部15は、センサから入力されるセンサデータが正常であるか否かをチェックするセンサチェックモードである場合、表示器16にセンサデータを表示させる。また、制御部15は、異常が発生した場合、表示器16に異常種別に対応したエラーコードを表示させるが、センサチェックモードである場合は、エラーコードよりも優先してセンサデータを表示させる。
(もっと読む)
1 - 4 / 4
[ Back to top ]