
Fターム[2B063AA10]の内容
移植機(田植機の接地部) (1,596) | 目的、機能 (297) | 移植機等の性能向上 (291) | 植付深さ又は間隔の調整 (10)
Fターム[2B063AA10]に分類される特許
1 - 10 / 10
移植機
【課題】植付深さを調整する調整レバー及び載せ台からの苗の掻き取り量を変更する変更レバーを設け、植付け深さ調整に整地作業機の昇降高さ調整を連動させる移植機において、左右バランスが良好な移植機を提供する。
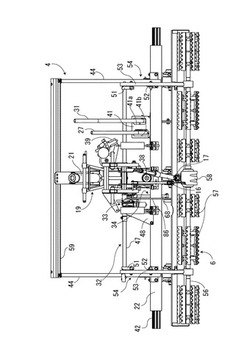
【解決手段】走行機体の後方に配置された苗載せ台と、苗載せ台の下方に配置されて苗を掻き取って圃場に植付ける植付部と、植付部の前方に配置されて圃場を整地する整地作業機6と、昇降作動機構33と、植付深さを調整する調整レバー31と、対地高さの変更に整地作業機6の昇降高さを連動させる連動機構34と、苗載せ台と植付部との距離を変更して苗の掻き取り量を変更する変更レバー27とを備え、植付作業機4の少なくとも一部を構成し、植付作業機の左右の一方側に、昇降作動機構33及び連動機構34を配置するとともに、他方側に調整レバー31及び変更レバー27を配置した。
(もっと読む)
田植機

【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
対地作業機
【課題】 整地ロータを備える水田作業機は、機体の前後長が長くなり、機体の前後重量バランスの悪化を招き、対地作業部による作業性を悪化させるおそれがある。また、整地ロータの後方位置に硬軟検出具を配置すると整地ロータからの泥流や水流が硬軟検出具に作用して硬軟検出が不安定になるおそれがある。
【解決手段】 対地作業部に機体正面視で左右後輪11間に位置するセンターフロート55の前方には左右後輪11間に中央整地ロータ27bを設け、左右後輪11の後方若しくは外側方に位置するサイドフロート56の前方には機体側面視で左右後輪11の後方に左右整地ロータ27aを設けると共に、中央整地ロータ27bの駆動軸70bと同じ軸心回りに上下に回動して先端部が土壌に突入することにより土壌の硬軟度を検出する硬軟検出具116を設け、該硬軟検出具116を中央整地ロータ27bと後輪11との間で且つ左右整地ロータ27aより前側に配置した。
(もっと読む)
水田作業機
【課題】 水田作業機において機体の後部に水田作業装置を昇降自在に支持し、対地作業装置を水田作業装置と機体との間に備えた場合、対地作業装置の破損を防止する。
【解決手段】 機体の後部に水田作業装置5を昇降自在に支持し、水田作業装置5と機体との間に対地作業装置54を備える。水田作業装置5の右及び左側部にガード部材65を備え、ガード部材65を対地作業装置54の右及び左の横外側に位置させる。
(もっと読む)
田植機
【課題】圃場面の整地装置を各フロートの前方に配置する田植機において、センターフロートの前端部に配設され、植付部の昇降制御機構と繋がる連動ワイヤの連結部を、前方部に新たに出現する空間を用いて構成し、かつ、連動ワイヤのレイアウトの改善をおこなう技術を提供することが課題である。
【解決手段】植付部3の植付フレーム体に揺動自在に支持するセンターフロート31を備え、該センターフロート31先端部の上下動により植付部昇降用油圧バルブの作動を制御する田植機1において、前記センターフロート31先端部に連接するリンク体(支持アーム61やリンク機構70等)を設け、該リンク体に前記油圧バルブを作動させるワイヤ体(連動ワイヤ46)を連接し、該リンク体が前記センターフロート31の上下動に連動して回動することにより、前記連動ワイヤ46を本機前後方向に作動させるようにした。
(もっと読む)
田植機
【課題】圃場面の整地装置を各フロートの前方に配置する田植機において、回動支点位置の異なる各フロートを同じ上下変位量をもって、植付け深さの調整をおこなうための技術を提供することが課題である。
【解決手段】植付部3の植付フレーム体を用いてセンターフロート31およびサイドフロート32を揺動自在に支持する田植機1において、センターフロート31とサイドフロート32の前端位置を前後方向で略同一位置に配置し、前記各フロート31・32と植付フレーム体を操作アーム体(連結機構48)で連接するとともに、前記センターフロート31の連結機構48を第一操作アーム(支持アーム35)と第二操作アーム(連結アーム45)とで構成し、支持アーム35の前部は植付フレーム体(フロート支持体33)に連接し、後部は連結アーム45の前部と回動自在に枢支し、連結アーム45の後部で前記センターフロート31を揺動自在に支持した。
(もっと読む)
田植機
【課題】上方に十分な大きさの空間を確保できない場合でも、センターフロート前端部に連動ワイヤを連動連結して、該センターフロート前端部の上下動の変化を昇降機構の油圧駆動部に正確に伝える。
【解決手段】走行部2に昇降機構4を介して連結した植付部3にセンターフロート31を上下方向に揺動可能に設けて、該センターフロート前端部と前記昇降機構の油圧駆動部との間に連動ワイヤ46を介設し、該連動ワイヤでセンターフロート前端部の上下動に連動させて油圧駆動部を作動させて、該植付部の昇降を行う田植機1において、前記センターフロートの前端部と連動ワイヤとの間にリンク機構70を介設し、該リンク機構によりセンターフロートの揺動時に連動ワイヤを前後方向に押し引きする構成とすると共に、前記リンク機構を支持する支持アーム61を植付部に上下方向に所定量回動可能に設け、該支持アームを付勢部材81で一方向に回動するように付勢した。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
農用作業機
【課題】 整地装置の上下操作と整地装置への動力の入切操作とを確実に行えるようにした農用作業機を提供する。
【解決手段】 走行機体11に昇降自在に支持された植付装置31と、前記走行機体11と前記植付装置31との間に配置され、かつ前記植付装置31に連動して昇降する整地装置51と、を備えた農用作業機において、前記整地装置51を前記植付装置31に対して、前記植付装置31に連動して下降した位置において、上下位置を調節する高さ調節手段111を設け、前記整地装置51を苗の植付け深さに対応して高さ調節する。田面と前記整地装置51のかご型ロータ57との相対位置を変化させることなく、確実な整地作業を行うことができる。
(もっと読む)
1 - 10 / 10
[ Back to top ]