
Fターム[2B084DN01]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ自動制御における制御特性 (13) | 自動制御起動時に特性 (2)
Fターム[2B084DN01]に分類される特許
1 - 2 / 2
コンバイン
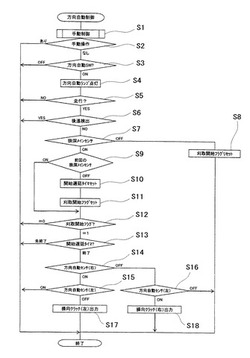
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
コンバイン

【課題】 分草装置8や引起装置9を畦に干渉させることなく、刈刃10を畦に接近させてこの畦際の植立穀稈を円滑に刈り取ることができるものとする。
【解決手段】 刈取部4の上部に配置する回動軸心Sを支点として分草装置8と引起装置9とを一体的に上下回動自在に構成する。そして、分草装置8と引起装置9との上方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を解除ないし中断させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ深扱ぎ側に補正する。また、分草装置8と引起装置9との下方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を開始ないし再開させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ浅扱ぎ側に補正する。
(もっと読む)
1 - 2 / 2
[ Back to top ]