
Fターム[2B304QA16]の内容
Fターム[2B304QA16]に分類される特許
1 - 6 / 6
苗移植機
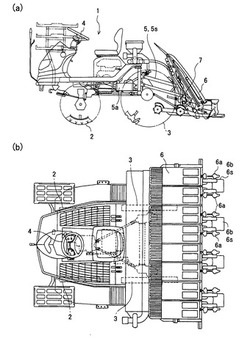
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
農作業機のリモコン装置

【課題】作業者に合うオフセット位置に作業部を容易に移動可能な農作業機のリモコン装置を提供する。
【解決手段】リモコン装置100は、作業部のオフセット位置を記憶する指令信号を送る作業位置記憶スイッチ101aと、農作業機の各種作動を制御する指令信号を送る指令スイッチと、各種作動を制御する指令信号データを記憶する記憶部111と、スイッチ101aや指令スイッチのオン時に指令信号データを記憶部111から読み込んで通信部112に送る制御部110を備える。制御部110は、スイッチ101aとスイッチ101bのオン時に、作業部のオフセット位置を記憶させる指令信号データを記憶部111から読み込み、その後のスイッチ101bのオン時に、作業部を現位置から記憶されるオフセット位置に移動させる指令信号データを記憶部111から読み込む指令信号データ選択部112aを有する。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1搭載用制御装置において、コントローラ210側の端子とコネクタ296側の端子との間で酸化皮膜が形成され、接触抵抗が増加し始めた異常初期の段階を把握できるようにする。
【解決手段】制御手段210,213,281,282には、各入出力系機器と制御手段210,213,281,282との接続部Jnにおける接触抵抗rnの変化を代替的に検出するための代替検出回路300,400を備える。制御手段210,213,281,282は、代替検出回路300,400の出力電圧V2と、制御手段210,213,281,282に予め記憶された規定電圧V0との比較結果に基づいて、接続部Jnの接触抵抗rnの異常初期を検出するように構成する。
(もっと読む)
コンバインにおける前処理部の昇降制御装置
【課題】コンバインを運転操縦するオペレータの好みや作業形態に応じて、前処理部の昇降制御速度を容易に切替ることができる昇降制御装置を提供する。
【解決手段】穀稈を刈取る前処理部16を油圧シリンダ33を介して昇降させる昇降操作具17を備えたコンバインにおいて、前記昇降操作具17の操作位置に応じて前処理部16の昇降速度を変更する可変速昇降制御と、前処理部16を一定の高速で昇降作動させる一定高速昇降制御とに切り替え可能に構成すると共に、当該昇降操作具17の把持部に両昇降制御を切り替える切替手段43を設けた。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘機が地面から離れて非耕耘位置に移動して1行程の耕耘作業を終了するときに、最終的に形成される盛り土及び耕耘跡穴を均すように、耕耘機の姿勢制御を実行できる農作業機の耕耘制御装置を提供する。
【解決手段】作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、耕耘機を昇降動する昇降制御アクチュエータと、耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、耕耘機の耕耘爪の耕耘深さを設定する耕耘深さ設定器と、昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、耕耘制御手段は、リヤカバーが耕耘位置から最閉位置に移動するまでの間は耕耘機をゆっくり上昇させて、耕耘爪による耕土の盛り上がりや耕耘跡穴を小さくし、リヤカバーが離陸した高さから旋回時の高さまでは急激に上昇させるパターンで制御するものである。
(もっと読む)
1 - 6 / 6
[ Back to top ]