
Fターム[2B304QC09]の内容
Fターム[2B304QC09]に分類される特許
1 - 5 / 5
苗移植機
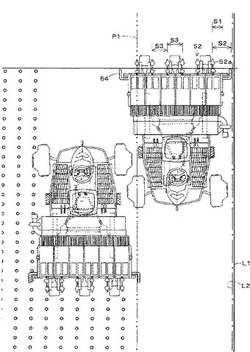
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
作業車両

【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
トラクタの作業機上昇制御装置
【課題】トラクタ車体の後部に作業機を昇降可能に装着して、油圧装置の伸縮リフトシリンダによって昇降制御する形態では、作業機上昇の上限位置で停止するとき、停止衝撃を発生する。この発明は、このような作業機の上昇停止時に発生するよる衝撃を緩和するものである。
【解決手段】作業機を有して昇降するリフトリンク1を設けた車体2の後部に、このリフトリンク1の接近を検出する近接センサ3を設け、この近接センサ3の検出によってリフトリンク1の上昇速度を減速することを特徴とするトラクタの作業機上昇制御装置の構成とする。また、近接センサ3として、リフトリンク1の動きを検出する画素カメラ4を設けたことを特徴とするトラクタの作業機上昇制御装置の構成とする。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
作業機の自動制御システム
【課題】 走行機体に連結した作業装置の位置あるいは姿勢を駆動手段によって変更制御するよう構成した作業機の自動制御システムにおいて、数多くのセンサ類を要することなく、複雑な制御を高い精度で安定良く行うことができるようにする。
【解決手段】 作業装置S、あるいは、走行機体Tと作業装置Sを撮像手段によって撮影し、撮影した画像の解析によって作業装置Sの位置情報あるいは姿勢情報を取得し、取得された情報に基づいて駆動手段を作動制御して作業装置の位置あるいは姿勢を変更制御する。
(もっと読む)
1 - 5 / 5
[ Back to top ]