
Fターム[2B304RA25]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | 緩衝機構、制動機構 (9)
Fターム[2B304RA25]に分類される特許
1 - 9 / 9
苗移植機
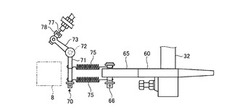
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
対地作業機の検出装置

【課題】作業機フレームに吊下げ状に設ける検出橇の変形破損の防止を図る。
【解決手段】走行機体の後部ヒッチ13に対して昇降調整自在に作業機フレーム7を設け、該作業機フレーム7に対地作業機1を装着し、前記作業機フレーム7に対して上下位置変更調節自在に2対の平行リンク27,28で折り畳み可能な支持機構部25を取り付け、この支持機構部25には圃場面に接地して対地作業機1の対地作用深さ又は高さを検出するための検出橇24を設け、上記対地作業機1を上昇操作するとこの上昇動作に連動して検出橇24の後部側が持上がる姿勢に切り替える連携手段34を設ける。なお、前記支持機構部25と走行機体後部との間に連携手段としてのワイヤ38を連結する。
(もっと読む)
農作業機
【課題】ローリングスプリング20と油圧ローリングシリンダ17によるロ−リング姿勢制御を自動的に切り替えることができる農作業機を提供することである。
【解決手段】所定時間内に走行部傾斜角センサ24の検出する傾斜角度の変化が所定範囲内であると、油圧ローリングシリンダ17が駆動制御しない状態として、緩衝部材20による苗植付装置6の姿勢変更を行い、前記傾斜角度の変化が所定範囲を超えると油圧ローリングシリンダ17によるロ−リング姿勢制御を行うように制御装置27がコントロールするので、苗植付装置6の姿勢変更を自動的に行うことができる。
(もっと読む)
田植機
【課題】植付部を所定の高さで保持した状態で、植付部から油圧シリンダへ衝撃として急激な力が加えられた場合であっても、当該力を、瞬時に、効率良く吸収することができる田植機を提供する。
【解決手段】走行部10の後部に昇降リンク機構53を介して昇降可能に設けられる植付部40と、昇降リンク機構53に連結して植付部40を昇降する昇降シリンダ54と、植付部40からの衝撃によって昇降シリンダ54に加えられる力を吸収するアキュムレータ65と、を具備する田植機1において、アキュムレータ65は、昇降シリンダ54の上昇側の油室に連通して、昇降シリンダ54に取り付けられるものである。
(もっと読む)
トラクタ
【課題】ダッシング現象およびその大きさをPTO軸の回転ひずみによって測定することによりダッシング量の大きさをいち早く判定しようとする。
【解決手段】機体後部にロータリ耕耘装置25を昇降自在に連結し、該ロータリ耕耘装置25には機体側PTO軸62の駆動力を受けて正転連動する耕耘軸33に複数の耕耘爪29を設けたトラクタにおいて、前記PTO軸62の回転トルクを測定するトルク測定手段71を設け、ロータリ耕耘装置25が非作業状態から作業状態へ降下する際の回転トルクの変動に基づいて機体のブレーキ機構60,60に制動出力する制御部42を設ける。
(もっと読む)
コンバインによる収穫方法とこの収穫方法に使用するコンバイン
【課題】 刈取り前処理部の圃場への突っ込みや沈み込みを防止しながら収穫作業できるコンバインによる収穫方法を提供する。
【解決手段】 刈取り前処理部10に作用する下降ストッパー手段8を効かせ、刈取り前処理部10を地面から設定刈り高さに浮上した連結高さに支持させながら、かつ、刈取り前処理部10が接地反力によって上昇操作されることを許容しながら収穫走行する。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
苗移植機
【課題】整地装置付き苗植付部のローリング精度の向上を図る。
【解決手段】走行車体2に設けた昇降リンク機構13により昇降自在の走行部側ベース14に整地ローリング軸16を介して整地ベース17を左右ローリング自在に設ける。整地ベース17に整地装置22を設けると共に、走行部側ベース14と整地ベース17との間を左右のローリングスプリング43,43で連結して整地ベース17を従動的に左右にローリング制御可能に構成する。整地ベース17には植付ローリング軸18により苗植付部19を左右ローリング自在に設けて、苗植付部19をローリングアクチュエータ21により整地ベース17のローリング制御状態に沿うように左右ローリング制御可能に構成する。
(もっと読む)
トラクタのドラフトコントロール装置
【課題】作業地の土壌条件やトラクタに装着される作業機の種類に十分に対応することができるドラフトセンシング荷重の調整範囲を有するとともに、簡単な操作によって感度調節を行うことができるトラクタのドラフトコントロール装置を提供する。
【解決手段】トラクタの機体後部に取り付けられ牽引式の作業機装着装置を構成するトップリンクを機体に連結支持するためのトップリンクヒンジ18と、機体側との間にバランスバネを有する牽引緩衝機構70を介装するトラクタのドラフトコントロール装置において、牽引緩衝機構70を、機体側とトップリンクヒンジ18との間を連結するセットボルト71と、該セットボルト71上に外嵌されるバランスバネ72と、該バランスバネ72の一側に設けられ該バランスバネ72のバネ荷重の調整を行うドラフトセンシング荷重調整機構80とを備える構成とした。
(もっと読む)
1 - 9 / 9
[ Back to top ]