
Fターム[2B382LA12]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動のための検出対象又は検出量 (268) | 長さ、距離、間隔又は位置 (167) | 距離 (72) | 地面と前処理部又は刈取装置との距離 (69)
Fターム[2B382LA12]に分類される特許
1 - 20 / 69
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置
【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
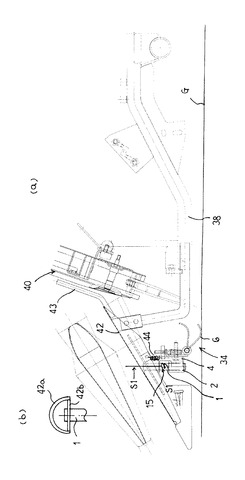
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバインの刈高さ制御装置

【課題】
比較的大きな凹凸部がある圃場での刈取作業でも、刈取部の分草杆の地面への突入を防止しながら刈取作業を行なえるものとする。
【解決手段】
刈取搬送部(7)を昇降させる昇降手段(15)と、刈取搬送部(7)の対地高さを検出する刈取接地センサ(SE2)と、刈取搬送部(7)の対機体高さを検出する刈高さセンサ(SE3)とを備えたコンバインにおいて、刈高さセンサ(SE3)の検出値と目標刈高さ設定値に基づいて昇降手段(15)を作動させる刈高さ昇降制御を実行し、刈高さ昇降制御の実行中に刈取接地センサ(SE2)によって検出される刈取搬送部(7)の対地高さが、刈取接地センサ(SE2)の接地部が地面より上方に離れた場合に検出される離間基準値以上の値になった場合に、刈取搬送装置(7)を下降させる側の出力を停止するコントローラ(21)を設ける。
(もっと読む)
コンバインの前処理昇降制御装置
【課題】刈高さ解除制御で下降させ過ぎた前処理部を少しだけ上昇させるためにマルチステアリングレバーを上昇操作すると、刈高さ解除制御のためにトリガースイッチを操作していることで前処理部が自動上昇駆動してしまい、オペレータの想定を超えて前処理部が上昇するという課題があった。
【解決手段】刈高さ解除制御手段(21C)の作動中は、前処理操作検出手段(22)による昇降操作レバー(11)上昇操作を入力しても、自動昇降制御手段(21A)による前処理部(5)の自動上昇駆動を行わないように牽制した。
(もっと読む)
コンバインの刈取装置
【課題】 湿田であっても刈取装置の対地高さを正確に検出でき、構造の簡素なコンバインの刈取装置を具現する。
【解決手段】 機台(2)の前側に昇降自在に支持した下部ギアケース(17)から、前方に向けて分草フレーム(18)を延出し、分草フレーム(18)の前端部に後上がり傾斜姿勢の分草板(29)を取り付け、分草フレーム(18)の前部には、刈取装置(6)に対して上下に揺動しながら接地追従する接地輪(28c)と、接地輪(28c)の上下揺動位置を検出するセンサ(28)を設け、接地輪(28c)の少なくとも一部が分草板(29)の上側に突出する構成とする。また、接地輪(28c)を樹脂材により成形し、接地輪(28c)の内部を空洞とする。
(もっと読む)
コンバインの刈高さ検出装置
【課題】 湿田であっても刈取装置の対地高さを正確に検出でき、構造の簡素なコンバインの刈高さ検出装置を具現する。
【解決手段】 昇降自在に設けられた刈取装置(6)の前部に、刈取装置(6)に対して上下に揺動しながら接地追従する接地輪(28c)と、接地輪(28c)の上下揺動位置を検出するセンサ(28)を設ける。また、接地輪(28c)を分草フレーム(18L)の前端部に支持された分草体の下側に配置し、接地輪(28c)の上部が分草体から上方へ突出する構成とする。また、分草体(26)を分草フレーム(18L)の前端部から引起装置(21)の下部へ向けて後上がりに傾斜した左右の分草ガイド(26,26)で構成し、左右の分草ガイド(26,26)の間隔部に接地輪(28c)が侵入する構成とする。
(もっと読む)
コンバイン
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
コンバインの刈高さ検出装置
【課題】刈取部の前後左右の動きによって接地体に前後左右方向から外力が作用しても、刈高さ検出装置が破損しないようにする。
【解決手段】刈取装置(27)に上下方向の支持軸(1)を設け、該支持軸(1)に対して第一支持体(2)を上下スライド自在且つ左右回動自在に支持し、該第一支持体(2)の後部に前後方向の前後軸(3)を設け、該前後軸(3)に対して第二支持体(4)の上部を上下回動自在に支持し、該第二支持体(4)の下部に左右方向のセンサ軸(5)を設け、該センサ軸(5)から後下方へ延出する接地体(6)を設け、該接地体(6)の上下回動角度を検出する角度センサ(10)を設ける。
(もっと読む)
コンバイン
【課題】圃場面が硬い場合も軟弱な場合も、接地部のスムーズな接地摺動を現出させることができるとともにとともに軟弱圃場での接地部による移動抵抗の増大や接地部への土の乗り上がりの発生を回避しやすいコンバインを提供する。
【解決手段】刈取り部10を接地追従するよう走行機体に昇降自在に支持させてある。刈取り部10を接地支持する接地部18を、接地部18の前端側に位置した支点Pまわりに上下揺動する姿勢変化をさせる姿勢変更手段40を介して刈取り部10の分草杆13に支持させてある。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
コンバイン
【課題】収穫作業中の車台水平制御出力によって、刈取昇降制御装置が地面に突っ込むことを防止する。
【解決手段】車台(11)を支持する左右一対の走行装置(10)に、該走行装置(10)を左右独立して昇降させる昇降機構を設け、車台(11)の前部には刈取前処理装置(13)を刈取昇降シリンダ(19)で昇降自在に設け、該刈取前処理装置(13)の地上高を刈幅方向の複数個所で検出する接地高さセンサ(25)を設け、該接地高さセンサ(25)で検出された地上高に基づいて走行装置(10)の昇降機構を制御して刈取前処理装置(13)を所定の地上高に維持するコンバインにおいて、接地高さセンサ(25)で検出された地上高が予め設定された下限高さ以下となった場合に、走行装置(10)の昇降機構への水平制御指令を停止する構成とする。
(もっと読む)
作業車
【課題】摘心作業と薬剤散布作業とを同時に行なって作業の効率化を図る
【解決手段】車体1の前側に前側昇降リンク機構10を介して前側散布装置Xのセンターブーム22を設け、車体1の後側に後側昇降リンク機構52を介してバリカン型切断装置65L,65Rを装着することによって、車体1の前側散布装置Xで作物及び土壌への散布作業を行ない、車体1後側ではバリカン型切断装置65L,65Rにより摘心作業を行う。また、前側昇降リンク機構10と後側昇降リンク機構52とは各別に昇降調節可能に設けるとともに、前側昇降リンク機構10と後側昇降リンク機構52との相対的な高さの差を維持して同時に昇降連動する共同スイッチ手段35を設け、後側昇降リンク機構52にバリカン型切断装置65L,65Rと後側散布装置Yとを前後に配置してなる。
(もっと読む)
コンバイン
【課題】本発明は、コンバインの刈取部を自動制御で昇降するようにした構成で、自動で昇降させる範囲の設定を容易にすることを課題とする。
【解決手段】車台11の前部に昇降可能に設ける刈取前処理装置13の地上高を検出する刈取高さ検出手段2を設け、該刈取高さ検出手段2の検出する地上高に基づいて刈高さ制御処理装置38で刈取前処理装置13を制御下限位置から制御上限位置の範囲で昇降制御するコンバインにおいて、刈高さ制御処理装置38を調整記憶モードに切換えると、刈取前処理装置13の昇降移動率を監視し、昇降移動を一定時間停止した位置を制御下限位置と制御上限位置として記憶すべくしたことを特徴とするコンバインの刈取昇降制御装置とする。
(もっと読む)
コンバインの刈り高さ検出装置
【課題】コンバインの刈り高さ制御用の接地センサを、圃場に接地したまま機体を後進させても破損しないものとする。
【解決手段】刈取装置の下部にセンサ取付体(1)の前部を横軸(1a)で上下回動自在に軸支し、該センサ取付体(1)の後部に圃場面に接地する接地体(3)を縦軸(4)で左右回動自在に軸支し、該接地体(3)の接地によってセンサ取付体(1)が刈取装置に対して上下回動した角度を検出するセンサ(8)とする。また、接地体(3)を側面視で円弧状に湾曲した帯状体とし、該接地体(3)の接地点から後方の部位を圃場面から離間させる。また、接地体(3)の後部を簾状に切り欠く。
(もっと読む)
コンバインの刈取フローティング装置
【課題】刈取搬送装置を、安定した弾性力で位置保持し、地表面基準で異常振動の発生も少なく、安定した作業走行が行なえるものとする。
【解決手段】走行フレーム(1)の前部に、刈取搬送装置(2)を、支持した刈取バランススプリング装置(3)のスプリング張力を、土壌の接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、いずれか一方の取付位置を、他方に対して遠近方向に自動的に調節してバランススプリング(8)の全長を変更することにより調整する構成とした。また、刈取バランススプリング装置(3)は、そのスプリング張力を、接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、走行フレーム(1)側の取付位置か、又は刈取搬送装置(2)側の取付位置のいずれか一方を、他方の取付位置に対して上下方向に取付位置を自動的に調節して前記バランススプリング(8)の全長を変更して調整する構成とした。
(もっと読む)
コンバイン
【課題】構造の簡素化及び低コスト化を図るようにしながらも、副切断装置の高さ調整を主切断装置とは別個に行える状態と、主切断装置の高さ変更に連動して副切断装置を姿勢変更させる状態とに切り換えることを、確実に行わせる。
【解決手段】主切断装置9が刈取搬送装置3に支持され、副切断装置14が走行機体2に上下揺動自在に装備させた昇降フレーム13A,13Cに支持され、刈取搬送装置3に対する副切断装置14の昇降作動の連係状態を切換操作自在な連係手段Bが、長孔が形成された案内部材51を副切断装置14側に、且つ、長孔に沿って移動自在に係合案内される被案内体52を刈取搬送装置3側に設けて、被案内体52の長孔に沿う移動を規制する連係用操作状態と被案内体52の長孔に沿う移動を許容する連係解除用操作状態とに切り換え自在な切換操作体53を案内部材51に備えて構成される。
(もっと読む)
作業機
【課題】対地高さを検出可能であって、当該検出機構の破損を効果的に防止した構成の作業機を提供する。
【解決手段】コンバインは、刈取部と、刈取部昇降シリンダと、を備える。刈取部は、穀稈を刈り取る。刈取部昇降シリンダは、刈取部を昇降させる。刈取部は、刈取フレーム66と、接地体85と、ポテンショメータ87と、を備える。刈取フレーム66は、当該刈取部の下部に配置される。接地体85は、刈取フレーム66を挟み込むように二股状に構成され、地面の凹凸に応じて揺動する。ポテンショメータ87は、接地体85の揺動に基づいて、刈取部昇降シリンダの制御のための信号を出力する。接地体85の二股状の部分に刈取フレーム66が接触することで、接地体85の揺動ストロークが規制される。
(もっと読む)
コンバイン
【課題】刈取装置の接地圧を軽減するために単一のバネを設けているので、付勢力が不足する。単一のバネで刈取装置の上下ストロークの全てを支持するため、バネ機構の作動スペースが大きくなる。
【解決手段】橇体22を有し刈取上下シリンダ19により昇降する刈取装置4を設ける。刈取上下シリンダ19とは別に刈取装置4を上昇側に付勢する補助付勢手段20を設ける。補助付勢手段20は、前側小径バネ29の前側バネホルダ27により構成した前側バネ機構25Aと、後側大径バネ30を有する伸縮自在の後側バネホルダ28により構成した後側バネ機構25Bから構成する。後側バネホルダ28の後側先端筒54が後側基部筒59に対して前後方向にのみ伸縮し、回転動しないように構成する。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
作業機
【課題】作業部を備える作業機において、容易かつ効率的な操作で作業部及び機体を昇降させることができるとともに、作業部を用いた作業に速やかに移行できる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの前進操作が検出されている場合において、刈取部が所定位置より上昇側にある状態で、刈取部昇降スイッチの上昇操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。また、制御部は、機体上昇制御が行われた後に、刈取部昇降スイッチの下降操作が検出されると、機体の高さを予め設定される手動設定位置まで下降させる機体下降制御を行う。
(もっと読む)
コンバイン及び対地高さ制御プログラム
【課題】土の取り込みを防止しつつ水平制御を行うことができる3つ以上の対地高さ検出用ソリ体を備えたコンバイン及び対地高さ制御プログラムを提供する。
【解決手段】対地高さ検出用ソリ体を少なくとも3個以上別々に配設し、それぞれが独立して対地高さを検出する。そして、左右端に位置する対地高さ検出用ソリ体36L、36Rは、畝に対する水平制御手段を有し、また、中央に位置する対地高さ検出用ソリ体36Cは、刈り高さ制御手段を有する。さらに、前記水平制御手段は、左右の畝における最大高さと最小高さの各検出値をもとにして対地平行制御を行い、また、前記刈り高さ制御手段は、3条の畝における最大高さの検出値をもとにして前記刈取部の昇降制御を行う。
(もっと読む)
1 - 20 / 69
[ Back to top ]