
Fターム[2B382MA29]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動の対象又は制御手法 (166) | 部材の位置移動又は回動 (103) | 前処理部又は刈取装置 (103) | 設定位置への移動、位置の維持 (56) | 刈高さ制御のための位置の維持 (41)
Fターム[2B382MA29]に分類される特許
1 - 20 / 41
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置
【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
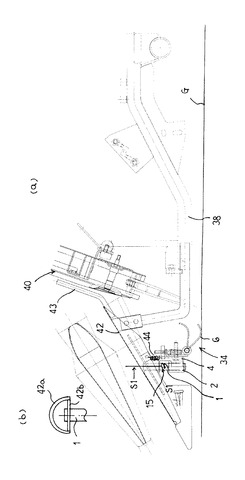
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバインの前処理昇降制御装置

【課題】刈高さ解除制御で下降させ過ぎた前処理部を少しだけ上昇させるためにマルチステアリングレバーを上昇操作すると、刈高さ解除制御のためにトリガースイッチを操作していることで前処理部が自動上昇駆動してしまい、オペレータの想定を超えて前処理部が上昇するという課題があった。
【解決手段】刈高さ解除制御手段(21C)の作動中は、前処理操作検出手段(22)による昇降操作レバー(11)上昇操作を入力しても、自動昇降制御手段(21A)による前処理部(5)の自動上昇駆動を行わないように牽制した。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
収穫機
【課題】作物の上端部の高さに適切に対応して取入部の高さを調整可能な収穫機を提供する。
【解決手段】コンバイン(収穫機)は、本体と、取入部と、収穫部昇降シリンダ18と、を備える。取入部は、立毛状態の作物から必要部分を分離して取り入れる。収穫部昇降シリンダ18は、取入部を本体に対して昇降させる。本体は、作物の上端部を検出する超音波センサ17を備える。そして、収穫部昇降シリンダ18は、超音波センサ17の検出結果に基づいて、取入部を昇降させる。
(もっと読む)
作業車
【課題】摘心作業と薬剤散布作業とを同時に行なって作業の効率化を図る
【解決手段】車体1の前側に前側昇降リンク機構10を介して前側散布装置Xのセンターブーム22を設け、車体1の後側に後側昇降リンク機構52を介してバリカン型切断装置65L,65Rを装着することによって、車体1の前側散布装置Xで作物及び土壌への散布作業を行ない、車体1後側ではバリカン型切断装置65L,65Rにより摘心作業を行う。また、前側昇降リンク機構10と後側昇降リンク機構52とは各別に昇降調節可能に設けるとともに、前側昇降リンク機構10と後側昇降リンク機構52との相対的な高さの差を維持して同時に昇降連動する共同スイッチ手段35を設け、後側昇降リンク機構52にバリカン型切断装置65L,65Rと後側散布装置Yとを前後に配置してなる。
(もっと読む)
コンバイン
【課題】本発明は、コンバインの刈取部を自動制御で昇降するようにした構成で、自動で昇降させる範囲の設定を容易にすることを課題とする。
【解決手段】車台11の前部に昇降可能に設ける刈取前処理装置13の地上高を検出する刈取高さ検出手段2を設け、該刈取高さ検出手段2の検出する地上高に基づいて刈高さ制御処理装置38で刈取前処理装置13を制御下限位置から制御上限位置の範囲で昇降制御するコンバインにおいて、刈高さ制御処理装置38を調整記憶モードに切換えると、刈取前処理装置13の昇降移動率を監視し、昇降移動を一定時間停止した位置を制御下限位置と制御上限位置として記憶すべくしたことを特徴とするコンバインの刈取昇降制御装置とする。
(もっと読む)
コンバイン
【課題】構造の簡素化及び低コスト化を図るようにしながらも、副切断装置の高さ調整を主切断装置とは別個に行える状態と、主切断装置の高さ変更に連動して副切断装置を姿勢変更させる状態とに切り換えることを、確実に行わせる。
【解決手段】主切断装置9が刈取搬送装置3に支持され、副切断装置14が走行機体2に上下揺動自在に装備させた昇降フレーム13A,13Cに支持され、刈取搬送装置3に対する副切断装置14の昇降作動の連係状態を切換操作自在な連係手段Bが、長孔が形成された案内部材51を副切断装置14側に、且つ、長孔に沿って移動自在に係合案内される被案内体52を刈取搬送装置3側に設けて、被案内体52の長孔に沿う移動を規制する連係用操作状態と被案内体52の長孔に沿う移動を許容する連係解除用操作状態とに切り換え自在な切換操作体53を案内部材51に備えて構成される。
(もっと読む)
コンバインの刈取フローティング装置
【課題】刈取搬送装置を、安定した弾性力で位置保持し、地表面基準で異常振動の発生も少なく、安定した作業走行が行なえるものとする。
【解決手段】走行フレーム(1)の前部に、刈取搬送装置(2)を、支持した刈取バランススプリング装置(3)のスプリング張力を、土壌の接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、いずれか一方の取付位置を、他方に対して遠近方向に自動的に調節してバランススプリング(8)の全長を変更することにより調整する構成とした。また、刈取バランススプリング装置(3)は、そのスプリング張力を、接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、走行フレーム(1)側の取付位置か、又は刈取搬送装置(2)側の取付位置のいずれか一方を、他方の取付位置に対して上下方向に取付位置を自動的に調節して前記バランススプリング(8)の全長を変更して調整する構成とした。
(もっと読む)
コンバイン
【課題】刈取装置の接地圧を軽減するために単一のバネを設けているので、付勢力が不足する。単一のバネで刈取装置の上下ストロークの全てを支持するため、バネ機構の作動スペースが大きくなる。
【解決手段】橇体22を有し刈取上下シリンダ19により昇降する刈取装置4を設ける。刈取上下シリンダ19とは別に刈取装置4を上昇側に付勢する補助付勢手段20を設ける。補助付勢手段20は、前側小径バネ29の前側バネホルダ27により構成した前側バネ機構25Aと、後側大径バネ30を有する伸縮自在の後側バネホルダ28により構成した後側バネ機構25Bから構成する。後側バネホルダ28の後側先端筒54が後側基部筒59に対して前後方向にのみ伸縮し、回転動しないように構成する。
(もっと読む)
コンバイン
【課題】本発明は、圃場の凹部を検知しても刈取前処理部を下降させないようにして刈取前処理部を確実に圃場面に突っ込むのを回避できるようにすることを目的とする。
【解決手段】刈高さ制御を行う制御手段を備えたコンバインにおいて、一方の刈高検出装置36により所定範囲から外れた高刈りの検出情報が検知されると、他方の刈高検出装置37による刈高さ制御に切り替え、刈取前処理部を上昇させる検出情報が検知されたときのみ刈取前処理部を上昇させる刈高さ制御を実行し、他方の刈高検出装置に基づいて刈高さ制御を実行しているときに一方の刈高検出装置36による検出情報が所定範囲内に戻ったときには、当該一方の刈高検出装置36のみの検出情報に基づいて刈高さ制御を実行する。
(もっと読む)
コンバイン
【課題】安価で、しかも刈取部の高さの制御が容易な掻込リールを装着したコンバインを提供することである。
【解決手段】機体の前側に配置した穀稈を刈り取る刈取部4の底部に設けた接地を検出する接地センサ40と刈取部4の対機体高さを検出する刈取高さセンサ66と刈取部4を機体に対して昇降自在に装着する昇降シリンダを備え、刈取部4の機体に対する高さを設定する刈取高さ設定ダイヤル52により設定された刈取部4の機体に対する高さに応じて接地センサ40と刈取高さセンサ66による検出値のいずれか一方に基づいて刈取部4の機体に対する高さの制御を行う制御装置60を設けたコンバインであり、刈取部4の機体に対する高さに応じて2つの高さセンサ40,66を使い分けることで制御操作が簡単となり、刈取部4の高さ制御のための部品点数が従来より少なくて済む。
(もっと読む)
コンバイン
【課題】分草体の圃場面への突っ込みを防止して刈取作業を円滑に行なえるものとする。
【解決手段】走行車台(3)の前部に植立穀稈を刈取る刈取装置(4)を昇降自在に設け、該刈取装置(4)の前側下部に、分草フレーム(9)の前端部に支持されて植立穀稈を分離する主分草体(10)を設け、分草フレーム(9)の前部に支持フレーム(12)の基部を上下回動自在に取り付け、該支持フレーム(12)の先端部に副分草体(13)を取り付けると共に該支持フレーム(12)にアーム(15)の基部を回動自在に取り付け、該アーム(15)の回動位置により刈取り高さを検出する刈高さセンサー(14)を設ける。
(もっと読む)
コンバインによる収穫方法とこの収穫方法に使用するコンバイン
【課題】刈取り前処理部の圃場への突っ込みや沈み込みを防止しながら収穫作業できるコンバインによる収穫方法を提供する。
【解決手段】刈取り前処理部10に作用する下降ストッパー手段8を効かせ、刈取り前処理部10を地面から設定刈り高さに浮上した連結高さに支持させながら、かつ、刈取り前処理部10が接地反力によって上昇操作されることを許容しながら収穫走行する。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】圃場面の状況や刈取対象穀稈の植立状態等の作業状況の違いに応じて適切な刈取昇降制御を行うことにより、良好な刈取作業を行うことが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部における刈幅方向の異なる箇所に配備された複数の接地式の対地高さ検出手段及び目標対地高さ設定手段の情報に基づいて昇降操作手段を制御する刈取昇降制御を実行する制御手段が、手動操作式の制御モード切換指令手段の指令に基づいて、2個の対地高さ検出手段のいずれかが目標対地高さよりも低い値を検出すると刈取部を上昇させる少数検出時上昇処理モードと、全ての対地高さ検出手段が目標対地高さよりも低い値を検出すると刈取部を上昇させる多数検出時上昇処理モードとを切り換える。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】作業者の熟練度や作業状況の違い等に応じて適切な制御状態で昇降操作手段の作動を制御することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部を昇降する昇降操作手段の作動を制御する制御手段Hが、自動制御処理を実行する制御モードとして、刈取部を上昇させる上昇処理及び刈取部を下降させる下降処理の夫々を実行する形態で昇降操作手段C1の作動を制御する自動昇降制御モードと、前記上昇処理及び前記下降処理のうちの前記上昇処理のみを実行する形態で昇降操作手段C1の作動を制御する自動上昇制御モードとを備えるように構成され、且つ、手動操作式のモード切換指令手段の切り換え指令に基づいて、前記自動昇降制御モードにて前記自動制御処理を実行する状態と、前記自動上昇制御モードにて前記自動制御処理を実行する状態とに切り換え自在に構成されている。
(もっと読む)
コンバインによる収穫方法とこの収穫方法に使用するコンバイン
【課題】刈取り前処理部の圃場への突っ込みや沈み込みを防止しながら収穫作業できるコンバインによる収穫方法を提供する。
【解決手段】刈取り前処理部10に作用する下降ストッパー手段8を効かせ、刈取り前処理部10を地面から設定刈り高さに浮上した連結高さに支持させながら、かつ、刈取り前処理部10が接地反力によって上昇操作されることを許容しながら収穫走行する。
(もっと読む)
コンバインの制御装置
【課題】走行車体が左右に傾いても刈取装置が刈る穀稈の位置が左右で均等になるようにして、刈取脱穀作業の円滑化と圃場の刈跡の美観向上を図る。
【解決手段】刈取装置(30)前端の左右の分草杆(1a,1d)に対地高さを検出する左右の非接触式の対地距離センサ(2a,2d)を夫々設け、刈取走行中に左右両方の対地距離センサ(2a,2d)が制御下限高さ以下を検出すると刈取装置(30)を上昇制御し、左右の対地距離センサ(2a,2d)の片側のみが制御下限高さ以下を検出すると左右両方の対地距離センサ(2a,2d)が制御下限高さ以上を検出するように走行車体をローリング制御する構成とした。
(もっと読む)
刈取収穫機の刈取部昇降構造
【課題】刈取収穫機の刈取部昇降構造において、例えば畦際での旋回が終了して刈取部を圃場面に下降させて次の刈取行程に入る場合、刈取部の先端部分が圃場面の凸部に突っ込むような状態を少なくする。
【解決手段】刈取部4を昇降駆動する昇降機構と、人為的に操作される昇降操作具とを備える。上方に設定された上昇限度UU1及び下方に設定された下降限度DD1の範囲において、昇降操作具の操作により昇降機構を上昇側及び下降側に作動操作、昇降操作具の操作により昇降機構を停止操作する制御手段を備える。制御手段の下降限度DD1を高低に変更する変更手段を備える。
(もっと読む)
コンバイン
【課題】刈取装置を滑らかに地面追従させると共に、上昇状態の刈取装置の姿勢を安定させて、刈取作業の能率を高める。
【解決手段】車台(1)の前部に刈取支持台(38)を設け、刈取装置(4)を支持する支持フレーム(12)の後端部を刈取支持台(38)に上下回動自在に取り付ける。そして、車台(1)側と支持フレーム(12)との間に、刈取装置(4)の自重よりも大きな推力によって該刈取装置(4)を強制的に上下動させる刈取上下シリンダ(39)と、刈取装置(4)の自重と略同等の推力によって該刈取装置(4)を弾性的に支持する刈取支持シリンダ(42)とを設ける。また、刈取装置(4)の下部に該刈取装置(4)の自重を接地支持する橇体(17)を設ける。更に、橇体(17)を刈取装置(4)に対して昇降調節する高さ調節装置(70)を設ける。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
1 - 20 / 41
[ Back to top ]