
Fターム[3C007CX03]の内容
マニピュレータ、ロボット (46,145) | 関節 (545) | 関節部に減速機を組み込むもの (198)
Fターム[3C007CX03]に分類される特許
1 - 20 / 198
多関節ロボット
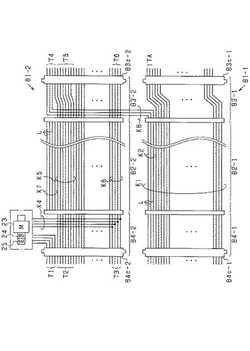
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
関節装置

【課題】ロボットの関節装置において、第1連結部と第2連結部の相対回転角度を規制する機構を持ちながらも、360゜を超える相対回転角度を実現する。
【解決手段】第1連結部1と第2連結部2を軸受部を介して連結し、第1連結部1に設けられた第1ストッパーピン6と、第2連結部2に設けられた第2ストッパーピン8と、第2連結部2と同心でフリーに回転可能な中間リング7と、を備え、中間リング7は、第1ストッパーピン6に対して第1回転角度(θ1)だけ回転可能にする突出部7dと、第2ストッパーピン8に対して第2回転角度(θ2)だけ回転可能にする凹部7dと、を備え、突出部7dと凹部7eのいずれか一方により、それ以上の回転が規制された後も、突出部7dと凹部7eのいずれか他方により回転が規制されるまで、第1連結部1と第2連結部2の相対回転角度を最大で、(θ1+θ2)まで許容する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
水平多関節ロボット及び水平多関節ロボットの制御方法
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
水平多関節ロボット
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
ロボット
【課題】 減速機の温度が上昇しても減速機収納室の内圧が上昇することを防止して、減速機収納室内の潤滑剤が外部に流出することを防止できるロボットを提供すること。
【解決手段】 スカラロボットAにおいて、駆動装置32をフレーム部材31に連結固定し、駆動装置32によって駆動される減速機33の出力部35をフレーム部材21に連結固定して、フレーム部材21に対してフレーム部材31を回転可能に組み付けるとともに、減速機33を収納する減速機収納室内に潤滑剤を充填した。そして、潤滑剤の上面より上方となる減速機収納室の空間部33bの所定部から、この所定部より上方の上方点まで延びて減速機収納室を外部に連通させる圧抜き経路38とエアチューブ39をフレーム部材31に設け、エアチューブ39の途中にコイル部39aを形成した。
(もっと読む)
ロボット
【課題】
適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】
基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を少なくとも有するロボットであって、第1構造体と第3構造体とは、同形状の鋳物材を用いて形成される。
(もっと読む)
ロボット及びロボットシステム
【課題】ロボットの制御性と安全性とを両立させる。
【解決手段】ロボットは、固定子31及び回転子を有するモータを関節機構S1に備えている。このロボットは、モータの固定子31が連結される第1リンク部材L1と、モータの回転子が連結される第2リンク部材と、モータの固定子31と第1リンク部材との間に設けられた弾性部材30とを有している。そして、この弾性部材30は、磁場によって弾性率が変化する可変弾性ソフトマテリアルで構成されている。
(もっと読む)
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。
【課題】電気機械装置を小型化する技術を提供する。
【解決手段】電気機械装置の一種である動力発生装置100は、中心軸110と、永久磁
石123を有するローター121と、ローター121の外周に配置されたステーターであ
る電磁コイル124と、ローター121に連結され、回転駆動力の伝達に用いられる回転
機構部130と、前記回転機構と負荷とを接続する負荷接続部133とを備える。ロータ
ー121には、中心軸110と永久磁石123との間において、少なくとも中心軸110
の軸方向の一方に開口し、回転機構部130の少なくとも一部を収容する収容空間として
の凹部1212が形成されている。回転機構部130は、ローターと接続または一体に形
成される入力部と、ステーターと接続または一体に形成される固定部と、負荷接続部13
3と接続または一体に形成される出力部とを有する。
(もっと読む)
サーボ、および、これに用いられるコネクタ
【課題】直列に接続することを可能にし、かつ配線の複雑度および構造を組み立てる際の難度を低減可能なサーボを提供する。
【解決手段】駆動部は、ハウジング20内に装着され、出力軸を有する。メス接続部はハウジング20内に装着され、メス端子364を有し、メス端子364は駆動部の出力軸に接続され、出力軸に駆動され回転可能である。オス接続部はハウジング20内に装着され、オス接続部とメス接続部とは駆動部の向かい合う両側に位置付けられ、かつ電気的に接続される。オス接続部はオス端子を有し、オス端子とメス接続部のメス端子とは互いに対応し、かつ別の一つのサーボのメス接続部のメス端子の接続に用いられる。
(もっと読む)
多関節ロボットおよびロボット関節構造
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
支持装置
【課題】荷重を受けた場合に、支持する複数箇所にて確実に分散することができると共に、それぞれの支持箇所の耐荷重に応じて適切な荷重の分散を容易にできる支持装置を提供する。
【解決手段】第一部位21に荷重Pを受け得る荷重受体20と、荷重受体20の第二部位22を非弾性体により支持する第一回転支持体31と、荷重受体20のうち第二部位22より第一部位21側に位置する第三部位23を弾性体により支持し、第一部位21に受ける荷重Pが無荷重の場合において荷重受体20が受け得る荷重Pの方向に予圧縮または予引張を付与した状態に設けられる弾性支持体40を備える。弾性支持体40による予圧縮または予引張の力F0は、荷重受体20の第一部位21に荷重Pを受けることによって弾性支持体40に生じる荷重F1より大きな力に設定される。
(もっと読む)
ロボット用回転関節における回転の機械的制限
【課題】機構の複雑化・大型化や周囲との干渉、美観の低下を抑制しつつ、許容回転角度の範囲が広い範囲に設定されたロボット用回転関節における回転を機械的に制限する。
【解決手段】ロボット用回転関節は、フレームと、フレームの内部に配置され中心軸回りに回転する略円柱形状の回転軸体と、回転軸体の回転を機械的に制限するメカニカルストッパと、を備える。メカニカルストッパは、穴を有すると共に、フレームにおける回転軸体の側面に対向する位置に固定されたフックと、両端が回転軸体の側面に固定されたワイヤであって、フックの穴を一度通ると共に、回転軸体の側面に沿って巻き付けられたワイヤと、を含む。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
ロボットの回転規制装置
【課題】狭いスペースに配設することができ、しかも、回転リンクの回転動作範囲を360度を超える角度に規制することも可能なロボットの回転規制装置を提供する。
【解決手段】手首アームのフレームの先端開口部を塞ぐ蓋部材に環状の収納空間30を形成し、この収納空間30内に両端を径小側内面壁30aと径大側内面壁30bに連結したフレキシブルバンド29を収容すると共に、フランジ(回転リンク)と一体に回転する掛合ピン41を挿入する。フランジが許容角度範囲を超えて回転しようとすると、掛合ピン41に引っ掛けられて径小側内面壁30aに巻き付けられるフレキシブルバンド29が伸び切ってフランジの回転を強制的に停止させる。
(もっと読む)
減速機の異常判定方法、異常判定装置、ロボット及びロボットシステム
【課題】通常の作業用プログラムを実行しながら、産業用ロボットの駆動系の異常判定や寿命診断に用いるデータを精度良く、かつ簡便に抽出することのできる方法や装置を提供する。
【解決手段】ロボット8の動作プログラムに基づいて生成された位置指令Xsに従ってモータ12を制御するモータドライバ10からモータ12へ出力されるトルク信号Tfについて、トルク信号Tfから重力補償トルクおよびロボットの他の軸による干渉力トルクを除去した後にハイパスフィルタ34を適用し、抽出された減速機14の振動成分によって減速機14の異常を判定する。
(もっと読む)
ロボットの回転規制装置
【課題】狭いスペースに配設することができ、しかも、回転リンクの回転動作範囲を360度を超える角度に規制することも可能なロボットの回転規制装置を提供する。
【解決手段】手首アームのフレームの先端開口部を塞ぐ蓋部材に環状の収納空間30を形成し、この収納空間30内に両端を径小側内面壁30aと径大側内面壁30bに連結した線状のフレキシブルワイヤー29を収容すると共に、フランジ(回転リンク)と一体に回転する掛合ピン41を挿入する。フランジが許容角度範囲を超えて回転しようとすると、掛合ピン41に引っ掛けられて径小側内面壁30aに巻き付けられるフレキシブルワイヤー29が伸び切ってフランジの回転を強制的に停止させる。
(もっと読む)
ロボット及びその製造方法
【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
ロボットおよび2台以上のロボットの組み立て方法
【課題】個体差を小さくすることが可能なロボットを提供する。
【解決手段】このロボット100は、アーム支持部2と、アーム支持部2に関節部を介して連結される下腕部3と、関節部に配置され、下腕部3をアーム支持部2に対して回動可能に連結し、偏心ギア77a(77b)が噛み合い位置を移動させながら回転する減速機7bと、アーム支持部2に対する下腕部3の相対的な回転位置が所定の位置にあるとき、減速機7bの回転角度位置が所定の回転角度位置となるように位置合わせ可能な位置決め部21b、71d、72eおよび3bとを備える。
(もっと読む)
1 - 20 / 198
[ Back to top ]