
Fターム[3C007HT34]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 磁気結合機構 (16)
Fターム[3C007HT34]に分類される特許
1 - 16 / 16
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
可変剛性機構及びロボット

【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
ダイレクトドライブモータ
【課題】雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出でき、更に信頼性を確保できるダイレクトドライブモータを提供する。
【解決手段】隔壁13の円板部13aの肉厚が、円筒部13bの肉厚より厚くなっているので、寸法精度や機械精度および温度変化に起因して、隔壁13に変形が生じた場合でも、薄肉の円筒部13bが先に変形することで、隔壁13の軸方向応力や曲げ応力を緩和することができ、それによりシール不良や破壊などを防ぐことができる。
(もっと読む)
多関節装置
【課題】不可避的な接触又は抗力に対して分離が可能な多関節装置を提供する。
【解決手段】多関節装置Mは複数の関節装置10を備える。関節装置10は、アーム1の一端部とアーム2の他端部とが可動自在に連結する。アーム1及び異なる関節装置10のアーム2が共有の軸心を有する。アーム1の他端面と異なる関節装置10のアーム2の一端面とが結合する。アーム1はN極を有する第1強磁性体4を他端面に備え、アーム2はS極を有する第2強磁性体5を一端面に備える。アーム1と異なる関節装置10のアーム2とは、第1強磁性体4と第2強磁性体5とが磁気結合する。又、アーム1と異なる関節装置10のアーム2とは、共有の軸心を屈折させる強い力が作用すると、第1強磁性体4と第2強磁性体5が分離する磁力で結合している。
(もっと読む)
顔表情表出ロボットの表情可変構造
【課題】簡単な構造で人間の顔表情を表出することができ、頭部全体の小型化、軽量化を実現できる他、眉や口等の模擬可動体又は模擬顔面の交換性を良好にし、また、メンテナンス性を向上させること。
【解決手段】顔表情表出ロボット10は、人間の顔面を模擬した模擬顔面12と、模擬顔面12の表面側に動作可能に取り付けられた眉体14と、眉体14を動作させて人間の顔表情を模擬表出する表情形成手段16とを備えている。模擬顔面14は、磁気を透過可能な材料及び厚みからなる。表情形成手段16は、眉体14に取り付けられた表側部材22と、模擬顔面14を挟んで表側部材22に相対配置された裏側部材24と、裏側部材24を移動させる移動機構16とを備えている。表側部材22及び裏側部材24は、何れか一方が磁石により構成され、何れか他方が磁石若しくは磁性体により構成されている。
(もっと読む)
アクチュエータおよびアクチュエータを用いた人工筋肉
【課題】簡単な構造により安定した大きな駆動力を供給可能な、電磁石を用いたアクチュエータを提供すること。
【解決手段】軸部材と、該軸部材に対して摺動する少なくとも2つの独立した摺動部材と、前記摺動部材上において、前記摺動方向について直列に配置された複数の電磁石と、前記電磁石に電流を供給する電流供給部と、を備えたアクチュエータにおいて、アクチュエータの全体長が収縮する方向、および伸張する方向の少なくとも一方について、前記摺動部材を摺動させる方向に斥力あるいは引力を発生させるように、前記複数の電磁石の極性を定めた。
(もっと読む)
磁気スピンドル軸受を伴うロボット駆動装置
フレームと、フレーム内に装着され、第1のモータ部および少なくとも1つの固定子軸受部を含む少なくとも1つの固定子と、少なくとも1つの固定子軸受部が実質的に非接触で磁力により支持する同軸スピンドルであって、その各駆動シャフトが回転子を含み、回転子は第2のモータ部および少なくとも1つの回転子軸受部を含み、少なくとも1つの回転子軸受部は少なくとも1つの固定子軸受部とインターフェース接続するように構成されている、同軸スピンドルと、を備える基板搬送アームのための駆動部。第1のモータ部は、所定の軸でスピンドルを回転させるように、第2のモータ部とインターフェース接続するように構成され、少なくとも1つの固定子軸受部は、少なくとも1つの回転子軸受部との相互作用を介して、同軸スピンドルに接続している基板搬送アームエンドエフェクタの少なくとも平準化を行うように構成されている。  (もっと読む)
(もっと読む)
基板搬送装置
【課題】基板の予備位置決め機構を搬入ステージ、露光ステージに設置することなく、露光ステージに搬送する前に基板の予備位置決めを行うことができ、ピンの設置位置の調整も簡単な基板搬送装置を提供することを課題とする。
【解決手段】前記搬入ステージ30上の基板Wの端面を押動して予備位置決めを行う予備位置決め機構2と、この予備位置決め機構を支持本体12により支持すると共に、予備位置決めされた基板を吸着して保持し前記露光ステージ40に搬送する搬送機構20とを備え、前記予備位置決め機構は、前記支持本体に支持された駆動手段6と、この駆動手段により駆動して前記基板の端面を押動する押動手段2とを有し、前記駆動手段は、円筒形の磁気軸体7と、この磁気軸体を軸周りに回動させる回動手段8と、この回動手段により回動する磁気軸体の周面に対面させて設けた直線状の第1長尺磁気体9Aおよび第2長尺磁気体9Bと、を有する構成とした。
(もっと読む)
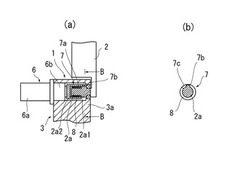
ロボットハンドの過負荷安全装置
【課題】ロボットハンドを磁気吸着し軸によって支持する方法により、過負荷に対する安全装置を構造簡素にして小形、軽量且つ安価なる構成にし、ロボットハンドに加わる左右又は上下又は前後の過負荷に対し有効に機能せしめるロボットハンドの過負荷安全装置を提供する。
【解決手段】ロボットハンド4が取り付けられる部位に第一磁気吸着座面3を設けると共に、ロボットハンド4に第二磁気吸着座面9を設け、上記第一磁気吸着座面3に第二磁気吸着座面9を磁気吸着して上記ロボットハンド4を取り付け支持すると共に、上記第一、第二磁気吸着座面3,9の一方の座面から突出する軸10を他方の座面で開口せる孔又は溝11内に嵌合し、上記ロボットハンド4に加わる過負荷により同ロボットハンド4が上記軸と孔又は溝11の嵌合を介して上記磁気吸着力に抗し左右回動又は上下移動又は前後傾動する構成としたロボットハンドの過負荷安全装置。
(もっと読む)
移動装置及び制御方法
【課題】長時間にわたって精密移動し得るようにする。
【解決手段】移動装置1は、第1ベース板3に対して、脚部ユニット11A及び11Bにおいて永久磁石7の磁力による通常吸着と当該永久磁石7及び電磁石部12の磁力による強吸着とを切り換えながら圧電素子10の全長を伸張させることにより前後方向に移動する第1移動部5と、当該第1移動部5と同様の動作により第2ベース板4を左右方向に移動させる第2移動部6とを組み合わせたことにより、第1ベース板3に対して第2ベース板4を2軸方向に自在に移動し得ると共に、静止状態においてコイルに電流を流し続けることなく静止位置を維持することができる。
(もっと読む)
ダブルアーム列式基板搬送用ロボット
【課題】 モータの必要台数を減らし、構造を簡単化、小型化、軽量化して、製作コストを低減することを可能にしたダブルアーム列式基板搬送用ロボットを提供する。
【解決手段】 アーム伸縮機構A、Bが左右に2列備えられ、最終段アームとなる第2アーム107、107’の先端にはハンド110、110’が結節されて設けられ、第1アーム105、105’を位相差を持って正逆回転させることにより、ハンド110、110’が位相差を持って直線運動するように構成されて成るダブルアーム列式基板搬送用ロボット101が、アーム駆動手段160をさらに備えている。アーム駆動手段160は、第1アーム105、105’に備えられる第1の永久磁石167、167’に対応させて、第2の永久磁石162、162’を有し、これが正逆回転することにより、これらの永久磁石の磁気結合を介して第1アーム105、105’が位相差を持って正逆回転する。
(もっと読む)
磁気による非接触駆動装置及びこれに用いるマグネット輪
【課題】 この発明は、非接触伝導によって発塵なく、かつ発ガスなく、クリーンルーム又は真空中で仕事をすることを目的としたものである。
【解決手段】 この発明は、複数のアームに夫々駆動軸を固定し、各駆動軸に夫々マグネット輪を固定すると共に、前記各駆動軸の各マグネット輪間に、遊動マグネット輪を非接触状に架設したことを特徴とする磁気による非接触駆動装置により解決した。
(もっと読む)
真空チャンバ用回転伝動機構
【課題】回転伝動軸数の多数化に際し、変形が少なく而も保守作業等も容易で且つ電動モータの給電線とチャンバ蓋との相互影響が無いようにする。
【解決手段】真空チャンバ10の底11に立設されその上蓋12に至る筒状体330+530と、この筒状体の側壁330,530を内外から挟んで磁気結合する回転体の複数対31+35,36+39,51+55,56+59とを具備した真空チャンバ用回転伝動機構において、筒状体の上端部位を真空チャンバの上蓋12に密着させる取着手段120を備え、筒状体330+530は、複数の短い筒状体330,530が上下に連結されたものであって、回転体55,59を駆動する電動モータ55a,59aへの給電線511,561が筒状体330+530を介して真空チャンバ10の下方へ引き出される。
(もっと読む)
基板搬送装置
【課題】 シングルアームの動作と連係して2本のチャックがそれぞれ独立して動作して基板等の搬送を行えるようにする。
【解決手段】 チャックに所定の直進動作を付与して基板を基板受け渡し位置まで搬送可能な基板搬送装置において、ベルト7によって回転駆動されるハンド駆動プレート10と、ハンド駆動プレートの上下位置に配設されハンド駆動プレートの回転動作に追従して旋回可能であって先端にチャック21A,22Aが連結された第1リストブロック13,第2リストブロック15と、それぞれのリストブロックのアーム3に対する旋回方向を規制する第1ストッパピン35,第2ストッパピン36と、を有する。ハンド駆動プレートと第1リストブロック,第2リストブロックとは磁力結合されており、ハンド駆動プレートが旋回するとストッパピンで規制されない方向についてはリストブロックも磁力結合によってハンド駆動プレートと同時に旋回する。
(もっと読む)
基板搬送装置
【課題】 搬送アームの先端に設けられ、簡単な機構により旋回時及び伸縮時に確実に基板を保持するとともに、所定位置で容易に基板保持を解除できるようなコンパクトな把持構造を実現する。
【解決手段】 基板Wを保持させた状態で直進運動可能な搬送アームを、旋回軸回りに旋回して基板Wを搬送可能な基板搬送装置の把持機構10において、旋回軸と一体的に回転して搬送アームの先端に取り付けられた搬送ベースプレート8の直進運動方向と一致する磁性体からなる規制プレート35を設ける。搬送アームの縮退に伴って搬送ベースプレート8が規制プレート35に近接した際に、搬送ベースプレート8上のクランク30の一部に取着された永久磁石32が規制プレート35に磁力吸引され、クランク30が支点回りの回動し、スライド部13が直進運動方向に変換され永久磁石32の磁力吸引力が及ぶ規制プレート35の範囲において、スライド部13先端の基板把持アーム12の先端で基板Wを把持する。
(もっと読む)
1 - 16 / 16
[ Back to top ]