
Fターム[3C007LS13]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | 模擬マニピュレータを用いた教示 (7)
Fターム[3C007LS13]に分類される特許
1 - 7 / 7
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
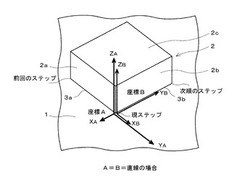
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
ロボットの駆動システム、及び、ロボットの駆動プログラム

【課題】 形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動するシステムを提供することにある。
【解決手段】 ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。
(もっと読む)
姿勢データ入力装置
【課題】より自然な姿勢データを簡易に入力できる技術を提供する。
【解決手段】姿勢データ入力装置は、ユーザが操作可能な複数の関節部を備えるロボット人形と、複数の関節部を駆動する制御手段と、ユーザ操作と制御手段による駆動が加えられた後の各関節部の角度データを姿勢データとして取得する取得手段を備える。各関節部の可動範囲を記憶しておき、制御手段によって各関節部がこの可動範囲内に収まるようにフィードバック制御することが好ましい。また、姿勢データを複数記憶しておき、ユーザが一部の関節部を操作すると、それに対応する姿勢データを抽出して、ロボット人形が抽出された姿勢データに従うようにフィードバック制御することも好ましい。さらに、既存の動作データをロボット人形で再生しつつ、その際に関節部の姿勢変化を許容して、動作データの編集を行うことも好ましい。
(もっと読む)
運動制御システム、運動制御方法および運動制御プログラム
【課題】人間(第1運動体)が接する環境およびこの環境に応じた運動態様と、ロボット(第2運動体)が実際に接する環境とに鑑みて、当該第2運動体の運動を従来技術よりも適切に制御することができるシステム等を提供する。
【解決手段】本発明によれば、人間1の運動態様のうち特徴的部分さえ学習されれば、他の部分が学習されなくても十分であるという思想のもとに人間1の運動態様が学習される。そして、人間1の運動態様のうち特徴的部分さえ再現されれば、他の部分は再現されなくても十分であるという思想のもと、当該学習結果としてのモデルが用いられてロボット2の運動態様が制御される。これにより、人間1の運動態様を規範としながらも当該運動態様に必要以上に拘束されることなく、ロボット2の運動態様が制御される。
(もっと読む)
動作データ作成装置及びその方法
【課題】モーションデータからロボットの動作データを作成する際に、関節の物理制限(関節の角度、角速度及び加速度)を考慮することで、ロボットが動作可能な動作データを作成することを可能にする。
【解決手段】タスク設定部320は、モーションデータ及び関節角度データを所定の時間ごとに分割し、分割した時間ごとにロボットの制御する部位を選択する。また、選択した部位の関節の制限条件を記憶装置360から抽出する。タスク設定部320は、関節の制限条件にタスクを設定する。優先度付与部330は、選択された部位の優先度を決定すると共に、関節の制限条件のタスクにも優先度を付与する。動作データ作成部340は、優先度に従ってタスクを制御することにより動作データを作成する。
(もっと読む)
ロボットの教示システム
【課題】 多関節型ロボットの教示を、低コストな手段でより簡単に行うことができる教示システムを提供する。
【解決手段】 ロボット2が有するアーム7〜12に夫々対応する教示用のアーム15〜20を有する操作部3を備え、作業者が、教示用アームの先端を変位させてロボット2に対する教示作業を行なう。その際、操作部3のアーム15〜20の変位量に応じてロボット2のアーム7〜12が連動し、アーム20先端の操作盤28にある液晶パネルにはアーム12先端のビデオカメラ13で撮像された画像が表示される。作業者が教示用アーム15〜20を変位させると、各関節J1〜J6のエンコーダ及びヨーレートセンサが夫々の変位量に応じた検出信号を出力し、パソコン4が座標変換処理を行ない教示用データを生成する。
(もっと読む)
ロボットの駆動方法
形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動する方法を提供することにある。ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。 (もっと読む)
1 - 7 / 7
[ Back to top ]